










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
直角坐标型书写机器人摹仿签名笔迹研究
[国中正1  , 陈维娜
, 陈维娜1, * , 杨求凤2 , 韩惠斌3 ]
, 陈维娜, 杨求凤|
|


第一作者简介:国中正,男,山东潍坊人,硕士研究生,研究方向为文件检验。E-mail:727946375@qq.com
目的 探究直角坐标型书写机器人摹仿签名笔迹的书写原理、笔迹特征以及书写机器人参数设置对笔迹特征的影响。方法 收集签名笔迹和机器人摹仿签名笔迹,借助VSC8000、RTI等仪器设备观察总结两者的异同。结果 机器人摹仿签名笔迹是利用贝塞尔曲线设计笔迹路径并转化为G代码指令从而控制机器人书写形成的,机器人摹仿签名笔迹与签名笔迹相比,概貌特征、局部安排特征和写法特征保持高度一致,搭配比例特征、笔画重复特征、笔顺特征、运笔特征以及笔痕特征存在差异;加速度和速度参数设置过大会导致笔画抖动;随着笔压参数增大,笔痕逐渐变深后保持不变,收笔随着笔锋参数和笔压参数的增大而增长。结论 机器人摹仿签名笔迹与签名笔迹的书写原理以及笔迹特征均存在差异,具有鉴定的可行性。
Objective To explore the operational principle of Cartesian-coordinate writing robot about its imitative signature handwriting and related characteristics on which how to consequently influence with the robot’s parameter setting.Methods The personal man-made signature handwritings and those of the writing robot were collected, having been observed into the characteristics of the robot’s imitative signature handwritings with the help of instruments (i.e., VSC8000 and RTI here).Results As the robot’s imitating signature handwriting is designed on Bezier curve and consecutively converted into G instructional code to control the robot to carry out writing, a highly consistency exists between the robot’s imitating signature handwriting and the one of personal man-made about their general features, local arrangements and writing-regulated features, yet the differences being present among their allocable proportion, repeated strokes, stroke order, pen’s running route and marks. Strokes’ jitter will result from the larger parameter setting of acceleration and speed. With the pen pressure-parameter augmenting, the pen marks maintain from gradual deepening to remaining unchanged. The pen’s closing stroke is to elongate along with the pen pressure/stroke parameters augmenting.Conclusions There are essential differences present in writing principle and handwriting characteristics between the robot imitative signature handwriting and the one of personal man-made, laying a feasibility for identification about such kind of signature handwriting.
2018年以来, 中国市场上流行一种直角坐标型书写机器人, 此类书写机器人在给工作带来便利的同时, 也有可能会被不法分子用来进行摹仿他人签名笔迹等犯罪活动, 给文件检验工作带来极大的挑战。法庭科学领域对书写机器人的系统研究较少, 在国外, McCarthy等[1]研究了Autopen等签名机器人的书写原理以及笔迹特征; Dumitra等[2]以Bond机器人为研究对象, 发现Bond机器人书写笔迹的笔痕深度基本一致, 字间距相同, 收笔较钝, 相同的字母可以完全重合。国内对于书写机器人书写特征的研究最早开始于2019年, 田孝雨、付海花等[3, 4, 5, 6, 7, 8, 9]对市面上的直角坐标型书写机器人进行了研究, 对笔迹特征进行了初步的总结。本文基于前人的成果, 结合书写机器人的工作原理, 以摹仿签名笔迹为研究重点, 研究机器人参数设置对笔迹特征的影响, 进一步挖掘书写签名笔迹与机器人摹仿签名笔迹的差异点, 为笔迹检验实战提供一定的参考依据。
直角坐标型书写机器人摹仿签名笔迹的原理:如图1所示, 在字体编辑软件中, 将签名笔迹作为背景参照, 使用贝塞尔曲线描绘摹仿笔迹的笔画路径并保存为矢量图形, 随后将矢量图形导入机器人控制软件并将其转化为G代码, 并将G代码进一步转化为脉冲信号, 使步进电机驱动X、Y、Z轴进行机械运动, 进而形成摹仿签名笔迹。
 | 图1 机器人摹仿签名笔迹的原理Fig.1 The principle of robot to imitate signature handwriting |
贝塞尔曲线作为计算机图形学中常用的参数曲线, 能够描绘出精准平滑的线条, 贝塞尔曲线最早应用于汽车的主体设计, 随后逐渐发展到路径规划、几何设计领域[10]。Endo在教学机器人的设计中, 就用贝塞尔曲线进行笔画的描绘[11]。经过调研和实验发现, 中国市场上的书写机器人进行摹仿签名笔迹的工具也是贝塞尔曲线(图2)。
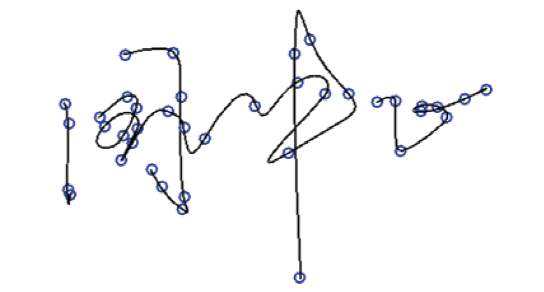 | 图2 贝塞尔曲线设计笔画路径Fig.2 Designing the moving route of signature’ s strokes into Bezier curve |
直角坐标型书写机器人使用的代码源于数控机床(CNC)的G代码, 其中G0表示快速移动, G1表示直线插补, G21表示以毫米为单位, G90表示使用绝对坐标, X、Y、Z表示坐标点的位置, F表示运行速度[12]。如图3所示, 以“ 正” 字的G代码文件为例, 共包含152行G代码信息, 表明将“ 正” 字切分成152个坐标点, 其中第二行代码“ G1 X19.926Y24.234F4000” 表示笔尖以4 000 mm/min的速度从坐标(19.908, 24.234)移动到坐标(19.926, 24.234)。
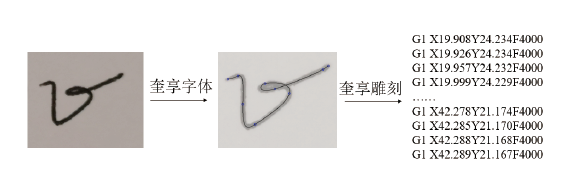 | 图3 “ 正” 字的G代码信息 |
1)硬件:CoreXY型直角坐标型书写机器人、VSC8000文检仪、DT超视觉成像仪(用于RTI成像)。2)软件:奎享字体(书写机器人专用的字体编辑软件)、奎享雕刻(书写机器人专用的控制软件)、RTIBuilder、RTIView。3)书写材料:晨光圆珠笔、得力牌A4纸。
2.2.1 签名笔迹的收集
召集15名志愿者, 要求每人在慢速、正常速度和快速条件下(如图4所示)各书写5个本人签名, 共收集225个签名笔迹。
 | 图4 签名笔迹的收集 (a:慢速; b:正常速度; c:快速)Fig.4 Different handwritings of real signature made with three writing speeds (a: slow; b: normal; c: rapid) |
2.2.2 摹仿签名笔迹矢量图形的制作
利用“ 奎享字体” 软件, 点击“ 新建图片” , 依次将收集到的225个签名笔迹作为背景, 利用贝塞尔曲线对摹仿签名笔迹的笔画路径进行描绘, 共制作225个摹仿签名笔迹的矢量图形(如图5)。
 | 图5 摹仿签名笔迹的矢量图形Fig.5 Vector conversion of imitating signature handwritings from those of Fig. 4 |
2.2.3 摹仿签名笔迹的书写
利用控制变量的方法, 研究速度、加速度、笔锋和笔压参数对笔迹特征的影响, 随后选择最理想的参数书写全部签名, 研究机器人摹仿签名笔迹和签名笔迹的特征差异, 具体步骤如下:
1)在225个摹仿签名笔迹的矢量图形中随机选择5个, 设计速度和加速度的交叉试验, 笔压和笔锋参数分别设置为-1.0和3, 设置速度参数:1 000、 2 000 ……15 000 mm/min; 设置加速度参数:1 000、 2 000 ……8 000 mm/s2, 每个签名在速度和加速度不同的120种情况下分别书写, 共收集600个摹仿签名笔迹, 探究速度、加速度参数对摹仿签名笔迹的影响以及最佳速度、加速度参数;
2)在225个摹仿签名笔迹的矢量图形中随机选择5个, 速度、加速度和笔压分别设置为5 000 mm/min、2 000 mm/s2和-1.0, 笔锋参数设置:0、1、2……10, 每个签名在笔锋不同的11种情况下分别书写, 共收集55个摹仿签名笔迹, 探究笔锋参数对摹仿签名笔迹的影响以及最佳笔锋参数;
3)在225个摹仿签名笔迹的矢量图形中随机选择5个, 速度、加速度和笔锋分别设置为5 000 mm/min、2 000 mm/s2和3, 笔压参数设置:0、-0.5、-1.0、-1.5、-2.0、-2.5, 每个签名在笔压不同的6种情况下分别书写, 共收集30个摹仿签名笔迹, 探究笔压参数对摹仿签名笔迹的影响以及最佳笔压参数;
4)在速度、加速度、笔锋、笔压参数最理想的情况下, 全部书写225个摹仿签名。
2.2.4 检验方法
利用VSC8000文件检验仪和DT超视觉成像仪对签名笔迹与书写机器人摹仿签名笔迹进行比对检验, 分析总结两者的异同。
3.1.1 速度与加速度参数对笔迹特征的影响
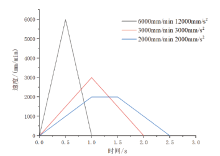
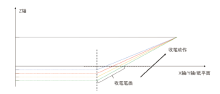
速度参数是指机器人书写时的运行速度, 加速度参数决定了加速(或减速)过程的快慢, 例如, 速度参数设置为4 000 mm/min, 加速度参数设置为2 000 mm/s2, 那么从速度0加速到运行速度的时间为2 s。此类书写机器人采用“ 梯形加减速” 的运动形式, 理论上, 在书写每一个笔画时, 都要经过匀加速、匀速、匀减速等过程, 然而当速度和加速度设置过大时, 整个运动过程时间很短, 导致可能没有匀速的过程, 如图6所示, 一个长度为5 cm的笔画, 在不同的速度和加速度设置下, 速度的变化曲线也不同。
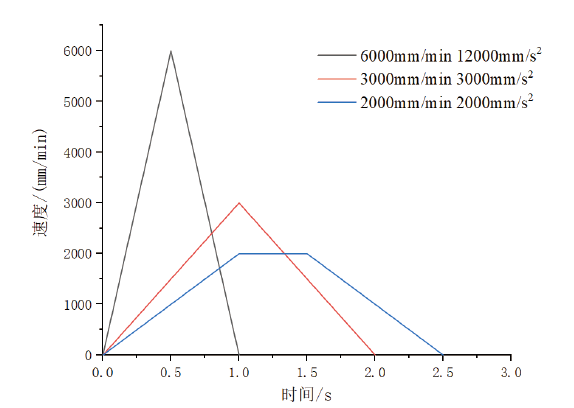 | 图6 不同参数设置下的速度变化曲线图Fig.6 Various curves changing with parameter-different setting of velocity |
当书写速度和加速度设置过大时, 书写机器人的机械结构承受不了大负荷, 机身会产生剧烈的晃动, 使得摹仿签名笔迹的笔画出现抖动弯曲现象, 本文所用的机器人在加速度超过3 000 mm/s2、速度超过5 000 mm/min时, 摹仿笔迹的笔画会出现抖动现象, 速度和加速度越大, 笔画抖动越明显(图7)。另外, 不同机械结构的书写机器人的稳定性不同, 同一机械结构用不同制作材料制成的书写机器人稳定性也不一样。
 | 图7 摹仿笔迹出现抖动现象 (a:2000mm/min, 2000mm/s2; b:5000mm/min, 5000mm/s2; c:7000mm/min, 7000mm/s2)Fig.7 Shaking strokes from the imitative handwriting under discrepant conditions (a: 2000mm/min, 2000mm/s2; b: 5000mm/min, 5000mm/s2; c: 7000mm/min, 7000mm/s2) |
3.1.2 笔锋参数对笔迹特征的影响
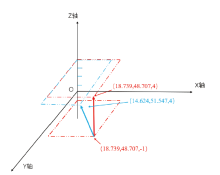
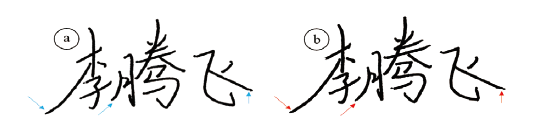
通过设置笔锋参数, 摹仿签名笔迹的笔画末端会出现逐渐变细的收笔特征, 呈尖形, 类似于书法中的“ 露锋收笔” 。机器人书写时出现逐渐变细的收笔特征的根本原因是改变了机器人书写的收笔方式。如图8a所示, 当笔锋参数设置为0时, “ 李” 字的“ 撇” 画的收笔代码为“ G1 X18.739Y48.707F5000、G1G90 Z4.0F5000” , 表示笔尖以5 000 mm/min的速度移动到最后一个坐标(18.739, 48.707, -1), 随后在Z轴方向垂直抬笔, 移动到(18.739, 48.707, 4), 如图9红色箭头所示, 故没有变细的收笔特征; 如图8b所示, 当笔锋设置为5时, “ 李” 字的“ 撇” 笔画的收笔代码为“ G1 X18.739Y48.707F5000、G1G90 X14.624Y51.547Z4.0F5000” , 表示笔尖以5 000mm/min的速度移动到最后一个点坐标(18.739, 48.707, -1), 随后移动到(14.624, 51.547, 4), 在此过程中, 笔尖逐渐离开纸面并在XOY平面内移动, 笔痕的深度由深变浅, 笔的宽度也由宽入细, 收笔动作如图9蓝色箭头所示。另外, 并不是每个笔画的末端都会出现逐渐变细的收笔特征, 其出现具有随机性, 不受人为控制。
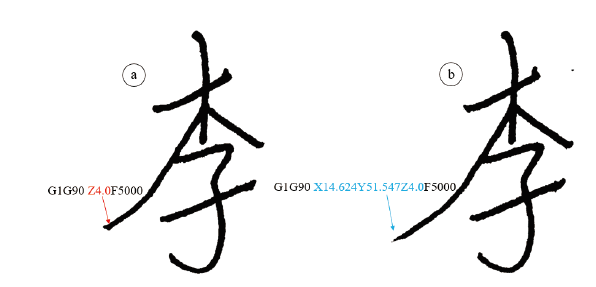 | 图8 不同“ 笔锋” 参数下的收笔形态 (a:笔锋0; b:笔锋5)Fig.8 The shape of closing strokes with different “ pen stroke” parameters (a: 0; b: 5) |
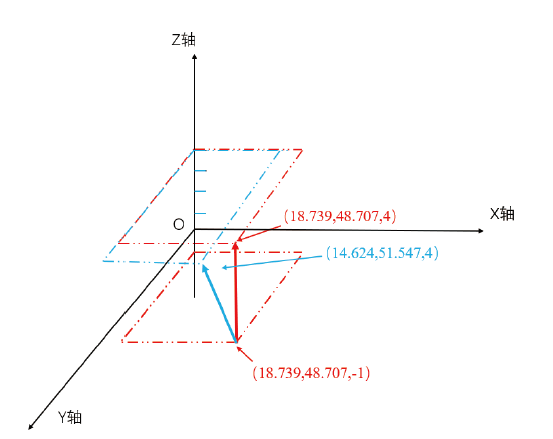 | 图9 不同“ 笔锋” 参数下收笔动作Fig.9 The action of the pen to close writing with different “ pen stroke” parameters |
在“ 奎享雕刻” 软件中, 笔锋设置参数共有11级, 分别为0(表示没有笔锋)、1、2……10。一般情况下, 笔锋参数值越大, 收笔笔画越长, 笔画末端逐渐变细的收笔特征越明显, 如图10所示, 然而, 笔锋参数设置过大, 收笔就会过长, 破坏签名笔迹的搭配比例。
 | 图10 收笔特征随笔锋参数增大而明显 (a-j笔锋参数依次为1-10)Fig.10 The elongating strokes from the closing pen with the “ pen stroke” augmenting its parameter (a-j stroke parameters are 1-10 in turn) |
3.1.3 笔压参数对笔迹特征的影响
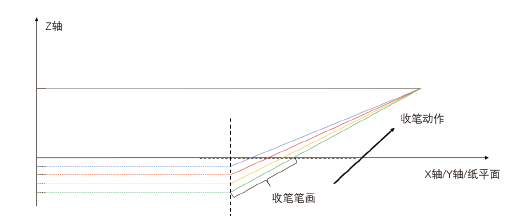
“ 笔压” 指的是机器人书写时控制笔尖作用于纸面的压力, 如图11所示, 在直角坐标系中, 垂直向上表示Z轴正方向, 书写压力可以用垂直向下的向量表示, 为了方便设置, 笔压参数用负数表示, 笔压参数的绝对值越大, 所表示的书写压力就越大。
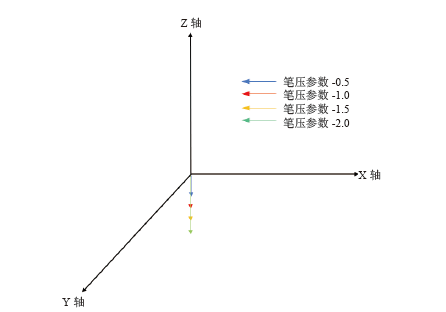 | 图11 书写笔压设置原理图Fig.11 Principled presentation to set up pen’ s pressure parameter |
笔压参数设置不同, 对笔迹特征影响最直观的是笔痕深度, 当笔压参数设置为0时, 笔尖刚接触纸面, 笔痕浅, 当笔压参数逐渐增大时, 笔痕的深度逐渐增大。理论上, 笔压参数不断增大, 笔痕的深度也是不断增大的, 但是, 目前设计的夹笔装置都有缓冲功能, 衬垫物对笔压也有一定的缓冲作用, 所以, 当笔压参数达到一定值, 笔迹的压痕深度将不会发生明显变化。
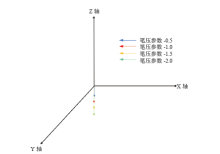
经过实验发现, 笔压参数会对笔迹的收笔长度产生影响, 笔压参数绝对值设置越大, 收笔越长, 笔画末端逐渐变细的收笔特征越明显, 如图12所示, 笔压参数的绝对值越大, “ 腾” 字“ 月” 部“ 撇” 的收笔越长, 这是因为在笔尖逐渐抬高离开纸面的过程中, 笔压绝对值设置越大, 笔尖抬高离开纸平面的过程就越长, 所以收笔笔画也会越长, 如图13所示。
 | 图12 收笔长度随笔压增大而增长 (a:笔压为-1; b:笔压为-2)Fig.12 The pen’ s closing strokes elongating with the larger pen’ s pressure parameters (a: -1; b: -2) |
 | 图13 收笔动作随笔压参数变化的原理Fig.13 Principled presentation of closing stroke changing with pressure parameter augmenting |
通过对速度、加速度、笔锋和笔压参数的研究, 我们得出书写条件最理想的参数设置:速度5 000 mm/min、加速度2 000 mm/s2、笔锋3、笔压-1.0。在此书写条件下, 书写全部225个摹仿签名笔迹, 与正常情况下书写的签名笔迹进行比对, 从而总结出机器人摹仿签名笔迹的检验要点。
3.2.1 概貌和局部安排特征
由于高阶贝塞尔曲线能够以签名笔迹为背景描绘出各种复杂笔画, 另外, 在“ 奎享雕刻” 软件中, 可以导入pdf或者图片文件当作背景, 摹仿者能够方便地根据页面背景对签名的大小和位置进行调整, 故225份签名笔迹与225份摹仿笔迹的概貌和局部安排特征基本保持一致。
3.2.2 写法特征
在225份签名笔迹中, 共有9份出现繁体字写法, 在利用贝塞尔曲线设计的过程中, 也采用相同的写法, 225份摹仿签名笔迹中有相同的9份繁体字写法的签名笔迹, 故签名笔迹与摹仿签名笔迹的写法特征完全相符。
3.2.3 搭配比例特征
在笔锋参数设置为0的情况下, 机器人摹仿签名笔迹与签名笔迹的笔画基本重复, 搭配比例保持一致;
在设置有笔锋的情况下, 某些笔画收笔动作发生改变, 末端就会出现逐渐变细的收笔特征, 上文在解释收笔逐渐变细的出现原理时提到, 机器运行到坐标最后一点时, 笔尖并不是垂直抬笔, 而是在抬笔的同时在XOY平面内移动, 从而笔画末端逐渐变细, 逐渐变细的这一部分笔画是在原笔画基础上的加长, 这就导致摹仿签名笔迹的搭配比例可能发生变化, 在225份摹仿签名笔迹中, 有39份笔迹的搭配比例发生变化, 主要体现于笔画的交叉部位以及平行笔画的长短比例上。
3.2.4 笔顺特征
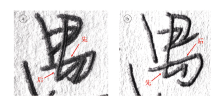
机器人摹仿签名笔迹的笔顺是由贝塞尔曲线的描绘过程决定的, 先描绘的笔画的书写顺序在前, 由于摹仿者和被摹仿者的书写技能与习惯可能存在差异, 所以笔顺就有可能存在差异点。在225份摹仿笔迹中, 有5份与签名笔迹存在差异, 如图14所示, 签名笔迹与摹仿签名笔迹的“ 愚” 字笔顺存在差异, “ 竖” 和“ 横折弯钩” 的书写顺序不一致。
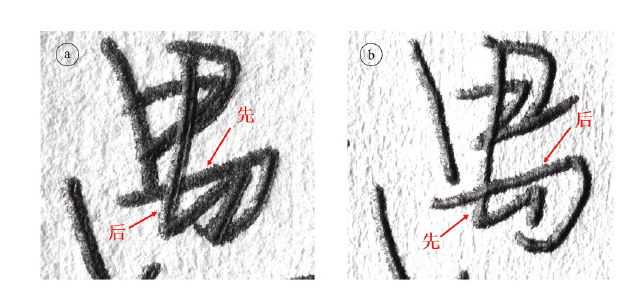 | 图14 签名笔迹与摹仿签名笔迹的笔顺差异 (a:签名笔迹; b:摹仿签名笔迹)Fig.14 The difference in stroke order between personal man-made signature handwriting (a) and the one of imitative signature (b) |
3.2.5 运笔特征
机器人书写的起笔方式只有一种, 通过分析G代码, 所有的笔画起笔都是笔尖运动到第一个坐标点的上部, 然后根据笔压参数进行垂直落笔, 再以设定速度和加速度往下一个坐标点移动, 所以摹仿笔迹的起笔端有较明显的顿压感, 呈圆形, 甚至可以观察到起笔端有小圆点, 如图15所示。
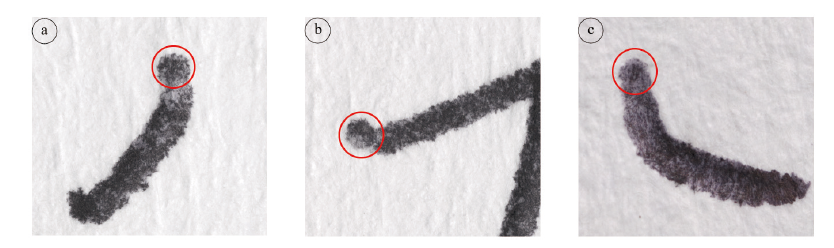 | 图15 书写机器人的起笔特征Fig.15 The characteristics of writing robot to start a stroke drawing |
机器人摹仿签名笔迹的收笔方式有两种, 如果笔锋参数设置为0, 那么收笔动作为运行到最后一个点后垂直抬笔, 笔画末端呈现圆形, 如果笔锋参数不设置为0, 那么收笔动作类似于书法中的“ 露锋收笔” , 笔画的收笔端呈现尖形。在签名笔迹中, 提高书写速度会出现连笔动作, 一般情况下, 书写水平高的人在连笔书写时, 连笔动作富于抑扬顿挫和轻重疾徐变化; 书写水平低的人, 其笔迹笔力变化频度低, 运笔平缓, 没有顿折, 缺乏节奏感, 运笔不连贯, 笔画宽度变化小。机器人书写压力是由事先设置好的参数决定的, 根据G代码, 连笔笔画的书写压力都是基本保持一致的, 所以, 机器人摹仿签名笔迹的连笔笔画深度和宽度基本保持一致。
3.2.6 笔痕特征
由于正常人书写执笔具有一定的角度, 所以在使用圆珠笔等具有滚珠的书写工具进行书写时, 滚珠与球座边口对纸面挤压会形成一条凸起的脊线。机器人的执笔角度基本为90° , 垂直于纸面, 所以笔痕中没有脊线, 如图16所示。
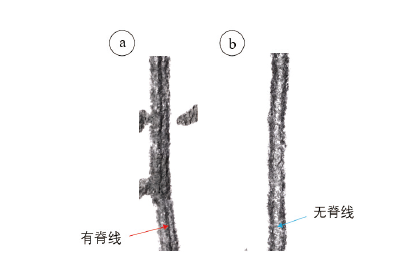 | 图16 笔痕特征差异 (a: 签名笔迹; b: 摹仿签名笔迹)Fig.16 Difference of marks from pen touching-on paper between personal man-made signature handwriting (a) and the one of robot’ s imitative signature (b) |
由于“ 奎享雕刻” 软件问题, 在将gap矢量图形转化为G代码的过程中, 某些笔画的G代码会连续出现两次, 导致机器人在书写时也会连续书写两次, 出现笔画重描现象, 在225份摹仿签名笔迹中, 有18份笔迹出现笔画重描现象。如图17所示, 在RTI影像下可以观察到“ 浩” 字的长横有重描现象, 即横笔连续书写了两次。机器人笔画重描特征一般难以发现, 因为两道重复书写的笔画的执行代码完全相同, 书写动作也完全一致, 一般情况下, 出现重描特征的笔画颜色浓重, 在RTI成像技术下, 可以观察到重描笔画的笔痕更深。
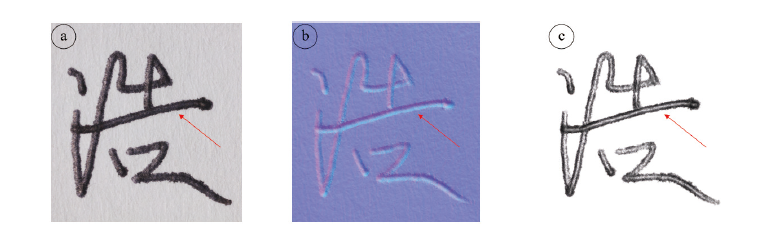 | 图17 笔画重复书写特征 (a:相机照片; b:RTI法向量模式; c:RTI镜像增强模式)Fig.17 The characteristics of repetitive written stroke (a: camera photo; b: RTI normal vector visualization; c: RTI specular enhancement) |
研究结果表明, 不同的参数设置会对机器人摹仿签名笔迹的特征产生影响:当速度和加速度设置过高时, 书写机器人负荷过大引起机身晃动, 会导致摹仿签名笔迹的笔画抖动; 通过设置笔锋参数, 机器人的收笔动作发生改变, 由“ 垂直抬笔” 变为类似于书法中的“ 露锋收笔” , 笔画末端呈现由粗变细的收笔特征, 该特征的出现具有随机性, 笔锋参数越大, 收笔笔画越长, 逐渐变细的收笔特征越明显; 笔压参数绝对值越大, 笔迹压痕逐渐变深后趋于稳定, “ 露锋” 收笔的长度也会随着笔压参数绝对值的增大而增长。
通过比对实验, 结果表明, 机器人摹仿签名笔迹的笔迹特征与签名笔迹具有鉴别的可行性, 其中, 概貌特征、局部安排特征和写法特征与签名笔迹保持高度一致, 笔锋参数过大会导致收笔过长, 从而破坏签名笔迹的搭配比例; 由于“ 奎享雕刻” 软件问题, 机器摹仿签名会出现笔画重描的现象; 摹仿者与被摹仿者书写习惯的差异可能会导致笔顺不同; 机器人书写的起笔动作是垂直落笔, 收笔动作是“ 垂直抬笔” 或者“ 露锋收笔” , 起笔端呈圆形或者小圆点, 收笔端呈圆形或者尖形; 执笔角度为90° 的书写机器人笔迹无脊线特征, 因此, 应对书写机器人摹仿签名笔迹的起收笔特征、连笔特征、笔顺特征、笔痕特征重点分析。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|