
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
警用多用途水下机器人动力结构设计
[钱俊兵1  , 徐中如
, 徐中如2 , 罗永铕3 , 潘楠1, * , 汤沐3 , 蔡晓铃3 , 刘益4 ]
, 徐中如, 汤沐|
|


第一作者简介:钱俊兵,男,云南文山人,博士,副教授,研究方向为刑事技术装备研发。E-mail: 1226160701@qq.com
水下打捞作业大多工作于浅水水域,其水下环境复杂多变,有许多诸如湍流、漩涡、风、浪和深水压力等各种各样的风险和不可预知的状况,会对水下机器人的运动和控制造成严重干扰,其面对外部扰动下的自动稳定和多维度运动的灵活性成为机器人水下控制和作业研发过程中的基础。本文提出了实现稳定和灵活运动的警用多用途水下机器人动力系统结构设计,设计了6自由度的驱动方式,并对其进行了运动分析。实验结果证明了设计和分析的正确性。
Portable underwater exploration robot ordinarily works in shallow waters where the environment is complex and changeable with many kinds of risks and unpredictable conditions, e.g., turbulence, whirlpool, wind, wave and water pressure, resulting in serious interference with the motion and control of underwater robot. Resistant to the external disturbance, the automatic stability and multiple-dimension-performing flexibility become the basis for underwater robot to research and develop into achieving its underwater control and operation. In this paper, the police versatile underwater robot is presented of its structure design of power system, with the 6-DOF (degree of freedom) driving mode being configured and the motion analysis carried out. The experimental results prove the correctness of both the design and analysis.
近年来, 部分犯罪嫌疑人在实施犯罪行为后为了隐瞒犯罪事实, 逃避打击, 在作案以后常常将关键物证丢弃在池塘、河流或水库中, 对于水下尤其是污水环境中的物证探测一直是刑警面临的难题。同时, 船底藏匿毒品、走私货物、违禁物的案件频发, 边防和水上公安干警需要更为适用的检查手段 [1]。目前, 复杂水质环境中的水下操作, 多依靠人力完成, 由于受水质环境、下潜深度的影响, 以及下潜时间有限以及水下温度极低等诸多条件限制, 潜水员往往工作难度大, 效率低, 耗费大量的人力物力, 而面对较为狭窄人无法进入的水管管道则更加难以作业。随着水下导航定位技术、自动控制技术和计算机技术的不断发展进步, 水下搜索探测技术的日渐成熟, 水下机器人在军事和民用领域也在不断扩展, 水下机器人在水下探测、安全搜救、铺设管线、海底考察、数据收集、钻井支援、海底施工、水下设备维护与维修、水产养殖以及援潜救生等各个领域均发挥着越来越大的作用, 在涉水深度大以及恶劣环境下水下机器人有着潜水员无法比拟的优势 [2, 3, 4]。由于人类的水下活动大都发生在水深小于 100 m的浅水水域, 用于浅水水域的水下机器人具有广阔应用前景, 它具备无需庞大水面支持、占用甲板面积小、噪音低、隐蔽性好和成本低等优点。但由于浅水水域的水流场复杂, 水体流速较大, 给小型水下机器人在浅水水域的悬停、艏向角锁定等运动控制带来了困难; 同时因浅水水域的水下环境光线较为昏暗、且存在大量异物等干扰因素, 导致光学成像设备的有效距离变短且成像效果变差。目前, 适用于浅水水域、造价低的小型水下机器人很少, 因此, 展开对浅水水域的警用多用途水下机器人的研发, 具有现实、紧迫和重要的意义。
根据警用多用途水下机器人的应用领域, 其应具备如下的运动特点:
1)水下机器人运动缓慢, 不能产生急剧的运动变化。
2)水中暗流、浪涌、障碍等扰动是随机的, 要求机器人系统具有较好的动态稳定性。
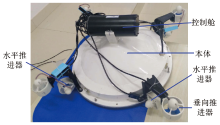
如果没有高效的稳定动力结构及控制系统及时的调整, 其将产生严重的动态误差, 以至无法进行正常的水下作业。因此, 其动力结构系统设计如图1所示。
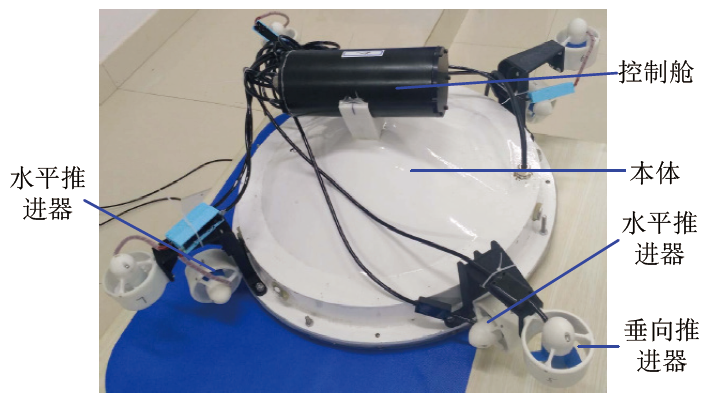 | 图1 机器人原理样机及总体结构布置图Fig.1 Robot prototype and its overall structure layout |
此机械结构布置方式具有如下的航行和姿态调整优点:
1)动力螺旋桨呈对称布置, 其在水下推进航行过程中, 可四个动力螺旋桨以相同的推进方式进行推进, 即以相同的工作方式进行工作。这样可极大简化控制的难度, 减少推进器的数量。
2)当便携式水下探测设备进行姿态调整时, 因八个动力螺旋桨是两两对称布置, 可利用轴对称线的方式, 进行姿态调整。同时因便携式水下探测设备轴对称线多达四条, 其也有四种姿态的调整方式可供选择, 这为后续的控制提供了方便和选择[5]。
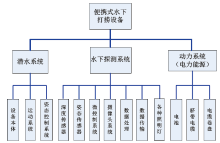
随着水下机器人应用的日益频繁和广泛, 人们对其功能需求也日益多样化和实用化, 要求警用多用途水下机器人所能完成的任务也越来越复杂、精确和多样, 这是新时期市场需求和技术发展的共同作用。除了具有体积小、重量轻的特点外, 集开放、模块化、定制化的多用途水下搜寻打捞机器人被凸显出来 [6]。水下搜寻打捞机器人大体由潜水系统、水下探测系统和动力系统三个部分组成, 如图2所示。
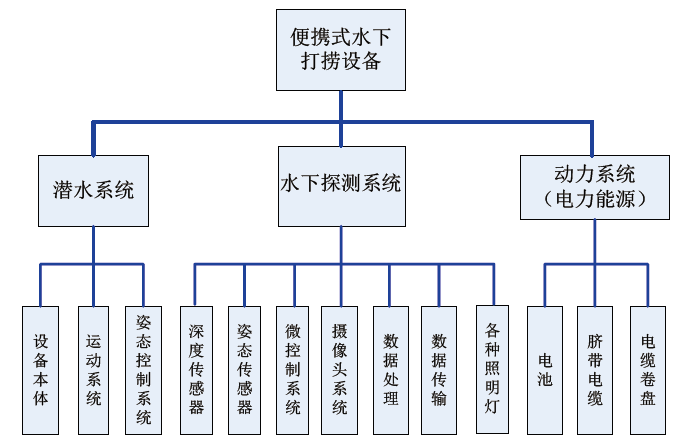 | 图2 机器人功能系统结构框图Fig.2 Block diagram of robot function systems |
潜水系统是警用多用途水下机器人的基础和平台, 包括设备本体、运动系统和姿态控制系统, 它为其他系统功能的实现和集成提供了有效的载体和平台。水下探测系统是警用多用途水下机器人的探测“ 器官” , 在未知的浅水水域探测中, 完成对未知水下的感知和探测 [7], 包括各种传感器及微控系统、摄像头及照明灯、作为信息系统中的数据处理和数据传输系统。便携式水下探测设备的动力系统(电力能源系统)是整个设备中的辅助系统, 为整个设备的正常工作提供电力供给, 包括电池、输送电缆及电缆卷盘。
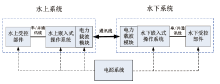
警用多用途水下机器人的工作系统主要分成水上和水下两个相对独立的系统, 即面向用户及辅助的水上系统和完成探测任务的水下系统。水上和水下系统共同协调一致完成对探测水域的工作, 其结构框图如图3所示。
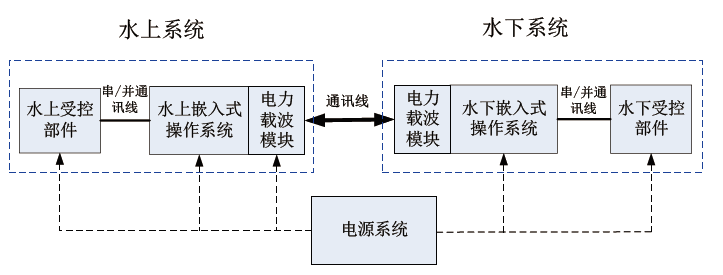 | 图3 机器人工作系统结构框图Fig.3 Block diagram of robot working system |
在探测工作中, 动力系统通过电缆为水下和水上系统提供电力供给, 水上系统与用户进行任务的交互, 并通过电力载波的形式把用户指令传递到水下系统, 同时, 电力载波模块也可完成水下系统的状态上传。水下系统可借助其搭乘的各种传感器和仪器相对独立地完成水上系统下达的探测任务。
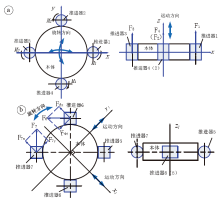
根据警用多用途水下机器人的工作特性, 其通常工作于浑浊的浅水水域, 水域水底地形复杂多变、能见度不高。往往需要对某些重点地带反复探测和观察。同时, 水域内常常伴随着各种暗流和涌动。所有这些都要求机器人的动力系统能提供一个在复杂浅水水域下的多姿态稳定结构。根据其动力布置结构, 对称布置了八个动力螺旋桨, 且两两对称布置, 可利用轴对称线的方式, 进行姿态调整。其动力学分析如图4所示。
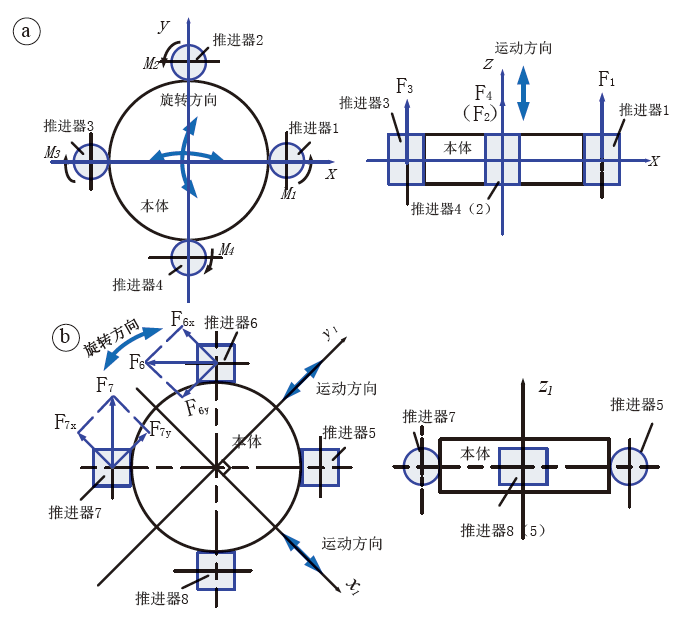 | 图4 机器人推进器驱动图(a:垂向推进器驱动图; b:水平推进器驱动图)Fig.4 Illustrative diagram of robot thruster (a. Vertical propelling; b. Horizontal propelling) |
在垂向推进器驱动设计中, 如图4a所示, 为了克服单个推进器的反扭矩, 采用对称同向旋转设计, 即推进器1和推进器3、推进器2和推进器4各成一组。组与组间推进器的桨叶旋向相反, 组间推进器旋向相同。同理, 水平推进器驱动设计中, 推进器5和推进器6、推进器7和推进器8各成一组, 如图4b所示。
为了验证水下机器人驱动系统的设计, 制作了原理样机如图1所示。采用了垂向推进器驱动系统与水平向推进器系统结合结构。并于实验室内进行了多个单自由度实验。在前、后运动的实验中, 水下机器人可保持稳定的前后运动, 而不发生旋转和歪斜, 完成了水平推进的单向平稳运动。在垂直于前后运动的左右运动中, 水下机器人同样保持了稳定的单向运动。
在旋转的推进器驱动实验中, 水下机器人能在原地完成顺、逆时针的平稳旋转运动, 没有发生明显的其他方向的运动, 说明了其驱动系统单自由度设计及控制的成功。在水平和垂向驱动的实验中, 为了验证水下机器人运动的平稳性, 在其主体的斜面放置了石块, 在整个实验中, 各石块都保持了原状态, 这充分说明了其完成各种单自由度运动过程中的平稳性, 也再次验证了驱动系统设计的成功。
如图5所示, 当浅水水域警用多用途水下机器人处于非平衡状态时, 其磁场、加速度和角速度传感器均能在x, y和z三轴方向进行测量, 并将其偏差值传送到控制器。控制器根据实时的多传感器测量值, 启动相应的推进器, 对浅水水域警用多用途水下机器人进行姿态调节, 以达到浅水水域警用多用途水下机器人的平衡状态。通过实验和传感器的测量可知, 所设计的浅水水域警用多用途水下机器人的测量系统及其驱动控制能对其进行实时和姿态的调节, 保证浅水水域警用多用途水下机器人处于稳定的状态中, 确保其搭乘的摄像头和打捞装置能稳定“ 安静” 的完成水下任务。
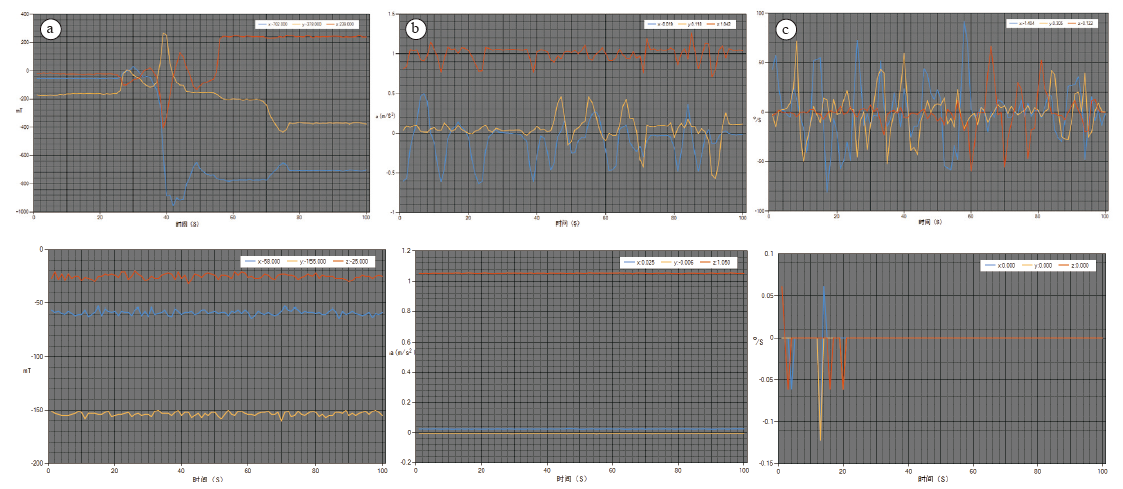 | 图5 非平衡(上)/平衡(下)状态下机器人传感器曲线(a:磁场; b:加速度; c:角速度。其中蓝色曲线为x方向分量, 橙色曲线为y方向分量, 红色曲线为z方向分量)Fig.5 Responding curve of robot sensor in unbalanced (upper)/balanced (bottom) state (a: magnetic field; b: acceleration; c: angular velocity; the blue/orange/red curve representing the measured value on the x/y/zdirection) |
由于浅水水域警用多用途水下机器人工作环境的复杂性和未知性, 本文针对其水下运动特点, 对其驱动系统进行了针对性设计, 并对其总体结构和控制系统进行了分析。基于制作的原理样机和实验室实验, 验证了驱动系统设计的合理性和有效性。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|