
May. 21, 2025

Realistic 3D Reconstruction of Traffic Accident Scene Based on UAV Oblique Photogrammetry Technology
LIU Jun, LI Wei, FENG Hao, GUAN Chuang, WANG Shiyuan
Realistic 3D Reconstruction of Traffic Accident Scene Based on UAV Oblique Photogrammetry Technology
The on-site investigation of traffic accidents in China mainly relies on two-dimensional exploration methods such as camera photographing, ruler measuring and hand-painted scene map. The works including photographing, fixing and position measurement of key trace material evidence are often manpower and time consumption. However, long-term scene investigation will occupy the accident section and even interrupt traffic, which will easily lead to secondary traffic accidents. To address the problem of low efficiency and difficulty in scene investigation work of road traffic accident using two-dimensional surveying methods, the unmanned aerial vehicle (UAV) oblique photogrammetry technology is introduced to achieve efficient and comprehensive scene surveys. This method utilizes consumer-grade UAV to capture high-resolution scene photos with location information through aerial photography. These photos are then processed by three-dimensional reconstruction, resulting in the digital reconstruction of the accident scene. The effectiveness of the digital reconstruction is evaluated in terms of reconstruction precision, reconstruction effect, and operation duration. Experimental results demonstrate that for the accident scene with an area of 20 m×30 m, the merging and reconstruction of photo sequences taken at different aerial heights can achieve centimeter-level precision in dimensional measurements, with a relative error of +1.6 cm for a 30 m road distance. The reconstruction results exhibit a true three-dimensional effect, which clearly displays road marks, scattered objects, and more. Moreover, the scene operation duration can be shortened to less than 5 minutes. This method realizes the digital reconstruction of three-dimensional scene at traffic accident sites, replaces traditional photo-based surveying methods, significantly improves scene investigation efficiency, and facilitates the rapid processing of traffic accident scenes.
scene investigation / traffic accident / realistic 3D reconstruction / oblique photogrammetry / unmanned aerial vehicle (UAV) {{custom_keyword}} /
| 名称 | 参数 |
|---|---|
| 影像传感器 | 1英寸CMOS 有效像素 2000万 |
| 镜头视角 | 77° |
| 等效焦距 | 28mm |
| 光圈 | f/2.8 - f/11 |
| 对焦点 | 1m 至无穷远 |
| 最大照片尺寸 | 5472×3648 |
| 图片格式 | JPEG / DNG (RAW) |
| GNSS | GPS+GLONASS |
| 最大上升速度 | 5m/s(S 模式) 4m/s(P 模式) |
| 最大水平飞行速度 | 72m/s(S 模式) |
| 起飞重量 | 907g |
| 尺寸 | 214mm×91mm×84mm(长×宽×高) |
Table 2 Some Exif informations of |
| 名称 | 参数 |
|---|---|
| 相机制造商 | Hasselblad |
| 相机型号 | L1D-20c |
| 光圈值 | f/11 |
| 曝光时间 | 1/30 s |
| 焦距 | 10mm |
| 最大光圈 | 2.971 |
| 35mm 焦距 | 28mm |
| 图片宽度 | 5472像素 |
| 图片高度 | 3648像素 |
| 拍摄时间 | 2023/3/29 11:57 |
| 纬度-GPS | 31;9;17.048299999994967 |
| 经度-GPS | 121; 31; 7.6989000000175167 |
| 高度-GPS | 23 |
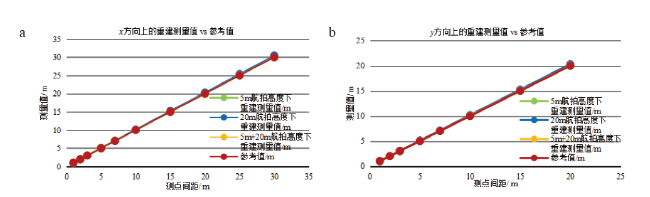
Fig.4 Comparison of reconstructed measurements with reference values (a: in the x direction; b: in the y direction)图4 重建测量值与参考值比较结果(a:x方向;b:y方向) |
Table 3 Screenshots of reconstruction results at different aerial altitudes表3 不同航拍高度下的重建结果截图 |
| 截图 | 5m航拍高度下 | 20m航拍高度下 | 5m&20m航拍高度下 |
|---|---|---|---|
| 俯视图 |  |  |  |
| 侧视图 |  |  |  |
| 局部放大图 |  |  |  |
| [1] |
冯浩, 陈建国, 张志勇, 等. 道路交通事故技术鉴定发展概述[J]. 中国司法鉴定, 2015, 82(5): 69-73.
道路交通事故技术鉴定利用法医学、痕迹物证学、交通工程学、道路工程学、车辆工程学等专业知识,从人、车、路、环境等方面综合分析交通要素与事故发生之间的因果关系。目前,道路交通事故的相关检验、鉴定内容从学科专业的角度可以基本分为以法医病理学、法医临床学、法医毒物学等为基础的道路交通事故法医学类鉴定,以痕迹物证学、车辆工程学、交通工程学和计算机声像技术等为基础的道路交通事故技术类鉴定,以及综合利用以上两种鉴定类别的道路交通事故综合类鉴定,其鉴定项目主要包括交通参与者的驾乘关系鉴定、两轮车当事人骑行或推行状态鉴定、伤残和死亡与事故之间的关系鉴定等。经过十余年的发展,道路交通事故技术鉴定已经成为道路交通事故调查的重要手段,为道路交通事故的调解、处理和审理工作提供客观、科学的技术依据。
(
道路交通事故技术鉴定利用法医学、痕迹物证学、交通工程学、道路工程学、车辆工程学等专业知识,从人、车、路、环境等方面综合分析交通要素与事故发生之间的因果关系。目前,道路交通事故的相关检验、鉴定内容从学科专业的角度可以基本分为以法医病理学、法医临床学、法医毒物学等为基础的道路交通事故法医学类鉴定,以痕迹物证学、车辆工程学、交通工程学和计算机声像技术等为基础的道路交通事故技术类鉴定,以及综合利用以上两种鉴定类别的道路交通事故综合类鉴定,其鉴定项目主要包括交通参与者的驾乘关系鉴定、两轮车当事人骑行或推行状态鉴定、伤残和死亡与事故之间的关系鉴定等。经过十余年的发展,道路交通事故技术鉴定已经成为道路交通事故调查的重要手段,为道路交通事故的调解、处理和审理工作提供客观、科学的技术依据。
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [2] |
潘少猷, 冯浩, 张志勇, 等. 制动协调时间在车速鉴定中的运用[J]. 中国司法鉴定, 2012, 65(6): 88-91.
(
Objective To establish a method of calculating vehicle speed by brake coordination time in vehicle speed estimation. Methods Detailed calculation procedures and the formation of errors were explained with a set of data. Results Brake coordination time should be a valid factor in determining the boundary values of the initial braking speed. Conclusion The initial braking speed can not be obtained directly by brake coordination time, but with this parameter, the result can be more accurate. {{custom_citation.content}}
{{custom_citation.annotation}}
|
| [3] |
颜深, 张茂军, 樊亚春, 等. 大规模室外图像3维重建技术研究进展[J]. 中国图象图形学报, 2021, 26(6): 1429-1449.
(
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [4] |
余加勇, 薛现凯, 陈昌富, 等. 基于无人机倾斜摄影的公路边坡三维重建与灾害识别方法[J]. 中国公路学报, 2022, 35(4): 77-86.
边坡灾害调查是及时发现边坡灾害隐患、预警边坡突发事故、避免重大人员伤亡和财产损失的重要手段。为克服传统人工边坡调查方法效率低、风险高、难度大等缺陷,提出了基于无人机倾斜摄影的公路边坡三维重建和灾害识别方法。引入运动恢复结构(Structure from Motion,SfM)和多视图立体匹配算法(Multi View Stereo,MVS),利用无人机多视角序列影像重构了公路边坡三维实景模型;利用基于多尺度模型与模型点云比较算法(Multiscale Model to Model Cloud Comparison,M3C2)的三维点云数据变化检测技术,实现了公路边坡滑坡、坍塌、落石等灾害场景的自动识别;通过边坡现场验证试验,证实采用无人机倾斜摄影方法构建的边坡三维实景模型的单方向精度均优于2.0 cm,并成功识别用于模拟边坡变化的最小尺寸为8.0 cm×9.0 cm×13.0 cm在内的纸箱位置、形状及尺寸;将该技术应用于某公路边坡工程地质灾害调查,成功识别出一处塌陷区域及隆起区域大约为65.0 m×15.0 m的边坡滑坡病害,构建的三维实景模型精度达到厘米级水平。研究结果表明:基于无人机倾斜摄影的公路边坡灾害调查方法适用于城市道路、公路等边坡自动化检测,尤其适用于陡峭、危险性高、难以抵达的边坡智能化检测,具有较强科学研究和工程实用价值。
(
Slope disaster investigation is an important work to timely discover hidden dangers of slopes, early warn slope accidents, and avoid major casualties and property damage. In order to overcome the shortcomings of the traditional manual survey such as low efficiency, high risk and difficulty, this paper presents a novel method for highway slope three-dimensional (3D) reconstruction and disaster Identification using unmanned aerial vehicle (UAV)-based oblique photography technique. A 3D reconstruction technique was introduced using Structure from motion (SfM) and multi-view stereo (MVS) algorithms. 3D realistic models of highway slopes could be reconstructed using UAV-acquired multi-view images. An algorithm based on Multiscale Model to Model Cloud Comparison (M3C2) was used for change detections of 3D point cloud data. Disaster scenes of highway slope such as landslide, collapse and rockfall could be identified automatically. A verification experiment was conducted to assess the accuracy of 3D realistic model in each direction. All of accuracies in three directions of the slope model are less than 2.0 cm. The positions, shapes and sizes of cartons, including a set of small cartons with sizes of 8.0 cm×9.0 cm×13.0 cm, were successfully identified, which were used to simulate slope changes. The proposed method was applied to a geological disaster survey of a highway slope project. A landslide disaster with a collapsed and raised area of approximately 65.0 m×15.0 m was successfully identification, and a 3D model of the highway slope with a centimeter level accuracy was established. In conclusion, the slope survey method based on the UAV oblique photography technique is suitable for slope automation detections of both highways and urban roads, especially for steep, dangerous and hard-to-reach slopes. The proposed method has strong scientific research and engineering practical value.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [5] |
侯明瑜, 黄衡, 程建川. 基于无人机航拍技术的城市主干路直线段车辆运行特征研究[J]. 交通信息与安全, 2019, 37(3): 51-60.
(
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [6] |
郑渊茂. 基于非接触式测量技术的交通事故现场快速勘查研究[D]. 厦门: 厦门理工学院, 2017.
(
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [7] |
陈强, 许洪国, 谭立东. 基于小型无人机摄影测量的交通事故现场勘查[J]. 吉林大学学报(工学版), 2016, 46(5): 1440-1446.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [8] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [9] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [10] |
晏于文, 俞涛, 刘冠华, 等. 无人机在几类案事件现场照录像中的应用[J]. 刑事技术, 2020, 45(3): 311-316.
传统的案事件现场方位照录像和现场概貌照录像存在难以在现场附近找到合适的拍摄制高点、拍摄点视角有限和一些危险的现场勘查人员难以进入等问题。航拍无人机具备操控性能好、机动灵活、成像质量较高等特点,将无人机引入现场勘查工作中,可以很好地解决现场方位照录像和现场概貌照录像中存在的一些问题,极大地提高现场照录相工作的质量和效率。本文在介绍无人机的基本原理和操控方法的基础上,对无人机在案事件现场照录像的实际应用情况进行了总结,归纳了爆炸类大范围案事件、高坠类案事件和现场低洼类案事件三类无人机适用的典型应用场景,并结合典型案例介绍了无人机的具体操作方法和注意事项。最后,本文分析了采用无人机开展现场重点部位照相和现场重点细目照相的可行性,并对无人机未来在案事件现场勘查中的应用前景进行了展望。
(
For the crime scenes, both azimuth and overview photographing/video-recording are required, yet the traditional manipulation is of limitations, e.g., difficulty to find the suitable shooting height/spot around the crime scene, restriction of visual angles at the shooting spot and some dangerous scenes to prevent investigating photographers from entering. Unmanned aerial vehicle (UAV) brings opportunities and promise to overcome the above problems since it excels in good handling performance, flexibility, wide range of environmental adaption and high image quality when it is fixed of man-controlling camera. Here, the introduction was at first conducted of UAV about its basic principle and manipulating methods, with the summarization being put through the actual applications where three suitable typical application scenarios were especially expatiated, the large-scale explosion scene, the high falling scene and the low-lying scene. Successively, the specific operation methods and precautions of UAV were illustrated in combination with the exampling cases of applications at typical crime scenes. Finally, an analysis was carried out on the possibility for UAV to photograph the key areas/subtlety of crime scene, with the applicable prospects of UAV being discussed in the future crime scene investigation.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [11] |
孙振文, 刘冠华, 王明直, 等. 无人机航拍技术在犯罪现场勘查中的应用探讨[J]. 刑事技术, 2016, 41(5): 398-401.
近年来,无人机产业发展迅速,随着制造成本的降低和技术的不断更新,体积小、重量轻、操作简便的微型无人机开始在市场涌现,无人机逐渐从军用市场走向商用。无人机可作为操作平台搭载不同的设备,具备侦查攻击、影像传输、物品投放、现场干预等功能,目前已广泛应用于公共安全、事故救援、森林防火、地质勘探、空中测绘、环境保护等领域。无人机航拍技术是以无人机作为搭载平台,通过专用照相机、摄像机以及视频无线传输技术从不同高度和角度俯瞰拍摄的方式获取图像和视频信息的技术。通过该技术可直观、快捷地获取案件现场的全景图像,解决大范围或大面积现场、特殊区域(海上、山区)发生的案事件或事故现场、道路交通事故及铁路事故现场、高层建筑火灾现场的全景拍照及快速取证问题。本文从试用情况和实际案例两方面介绍了无人机航拍技术在犯罪现场勘查方面的应用现状,对该技术在犯罪现场勘查领域的应用前景进行了展望。
(
With the continuous decline of production cost and improvement of performance, the unmanned aerial vehicle (UAV) industry has developed rapidly from high-end commercial use to mass market in recent years. UAV has the advantages of small size, light weight and easy operation so that it can be deployed to make reconnaissance and/or attack, photograph and transmit, deliver goods and conduct scene intervention. Until present, UAV has been widely used in public safety, accident rescue, forest fire prevention, geologic exploration, aerial photography, environmental protection and others. UAV aerial photography is to take photos of the ground and objects from different heights and/or angles by the UAV equipped with high-definition camera plus video and wireless video transmission device, being categorized into the low altitude photography that is permitted to carry out at a height less than aviation control. This paper explicates the on-going application of UAV aerial photography in crime scene investigation and prospects its development trend.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [12] |
冯文灏. 近景摄影测量:物体外形与运动状态的摄影法测定[M]. 武汉: 武汉大学出版社, 2002.
(
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [13] |
大疆. 御 MAVIC 2技术参数[EB/OL].[2023-05-03]. https://www.dji.com/cn/mavic-2?site=brandsite&from =landing_page.
( DJI. MAVIC 2 technical parameters[EB/OL]. [2023-05-03]. https://www.dji.com/cn/mavic-2?site=brandsite&from =landing_page.)
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [14] |
FARO推出用于三维建档激光扫描仪Focus3D的最新版本[J]. 遥感信息, 2012, 119(1): 61.
(FARO introduces the latest version of its laser scanner Focus3D for 3D documentation[J]. Remote Sensing Information, 2012, 119(1): 61.)
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| {{custom_ref.label}} |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
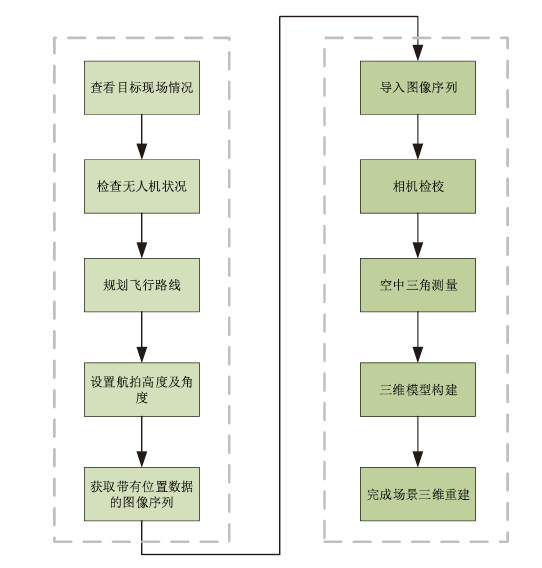
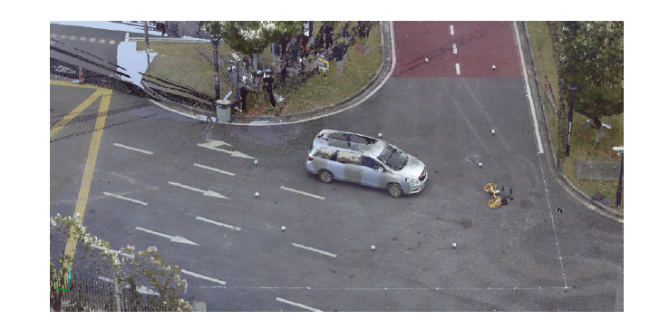
 Fig.1 Operation flowFig.2 Aerial photo of simulated accident scene
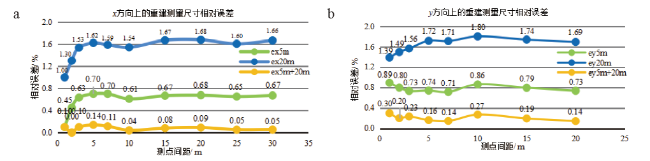
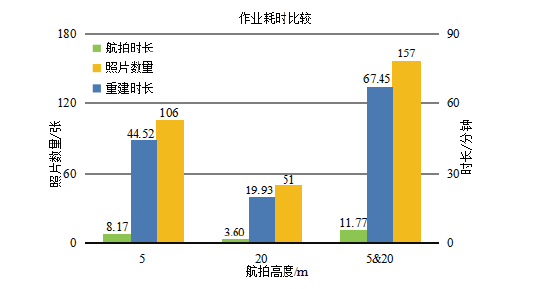
Fig.1 Operation flowFig.2 Aerial photo of simulated accident scene Table 1 Some parameters of the DJI Mavic 2 Professional drone[13]Table 2 Some Exif informations of Figure 2Fig.3 3D laser scan of the accident sceneFig.4 Comparison of reconstructed measurements with reference values (a: in the x direction; b: in the y direction)Fig.5 Relative error distribution of reconstructed measurements (a: in the x direction; b: in the y direction)Table 3 Screenshots of reconstruction results at different aerial altitudesFig.6 Comparison of Operation time
Table 1 Some parameters of the DJI Mavic 2 Professional drone[13]Table 2 Some Exif informations of Figure 2Fig.3 3D laser scan of the accident sceneFig.4 Comparison of reconstructed measurements with reference values (a: in the x direction; b: in the y direction)Fig.5 Relative error distribution of reconstructed measurements (a: in the x direction; b: in the y direction)Table 3 Screenshots of reconstruction results at different aerial altitudesFig.6 Comparison of Operation time/
| 〈 |
|
〉 |



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}