


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
地面三维激光扫描在交通事故勘查及重建中的应用进展
[关闯 , 冯浩
, 冯浩* , 衡威威, 张志勇, 李威, 姜镇飞]
, 冯浩, 衡威威, 张志勇, 李威, 姜镇飞]
|
|


第一作者简介:关闯,男,河南周口人,硕士,助理工程师,研究方向为道路交通事故重建。E-mail: guanc@ssfjd.cn
本文回顾了地面三维激光扫描技术的发展历程和应用场景,简要阐述了地面三维激光扫描系统的技术原理和作业流程,对地面三维激光扫描技术在交通事故领域的应用进行分类,并详细梳理了各类别下的最新研究成果与实例,结合交通事故勘查和重建发展需求,探讨了目前存在的问题和未来发展方向。
Terrestrial 3D laser scanning (TLS) technology was here reviewed into its progressional development and application scenarios, with the relevant technical principles and operation procedures being briefly elucidated. Further, TLS technology was therewith divided into different applications so as for traffic accidents to be able to tackle adequately. Through the detailed looking-up about TLS latest researches and exampling implementations, an exploration was tried to carry out for traffic accidents to be surveyed and reconstructed under the on-going requirements, with the discussion being made about the current problems and future development directions, too.
地面三维激光扫描(terrestrial 3D laser scanning, TLS)技术, 又称实景复制技术, 是一种集光学、电子、计算机、软件工程等技术于一体的新兴测量技术[1]。El-Hakim于1997年开发的室内三维测绘与虚拟环境系统可以看作是地面三维激光扫描系统的雏形[2], 此后经过20多年的发展, 地面三维激光扫描系统已经形成了相当规模的产业化, 主流的设备供应商包括美国的Surphaser、Trimble、FARO, 加拿大的Optech, 德国的Z& F, 瑞士的Leica, 奥地利的Riegl以及国内的南方测绘、武汉海达数云等, 软件解决方案有Trimble PointScape、FARO SCENE、Leica cyclone以及第三方软件Geomagic、Polyworks等[3-4]。
地面三维激光扫描系统根据载体不同可以分为移动式扫描系统和固定式扫描系统[5], 一般地, 地面三维激光扫描系统往往特指固定式扫描系统。移动式系统以激光扫描仪为主体, 辅以全景电感耦合器件(charge coupled device, CCD)相机、里程计、全球定位系统(global positioning system, GPS)以及惯性测量单元(inertial measurement unit, IMU), 多应用于城市测绘、高精度地图等场景[6]。近年来, 固定式扫描系统也通过配备数码相机的方式获取目标色彩信息, 进一步扩展了固定式扫描系统的灵活性和适用性。在公共安全领域, Hakim等[7]将TLS应用于刑事侦查中血溅原点的推断; Johnson等[8]利用FARO三维激光扫描仪进行犯罪嫌疑人的身高信息估计; 此外, Vock与大众汽车公司事故调查部门合作, 利用移动激光扫描技术设计了交通事故现场自动分割重建的系统[5]; Topolsek等[9]对交通事故调查测量工具进行了系统的准确性分析, 通过对比全站仪、GPS、TLS以及摄影测量等工具, 发现TLS具有高度还原事故现场、有效减少事故引起的交通延误等优势。
综上所述, 得益于高精度、非接触、自动化采集等技术特点, TLS的应用领域不再局限于传统的工程测绘, 而是呈现多样性特点。本文主要对地面三维激光扫描技术的技术原理、作业流程、应用领域进行简要阐述, 重点研究其在交通事故现场勘查及过程重建中的关键技术和应用实例, 为利用TLS技术开展道路交通事故勘查重建提供新的思路和解决方案。
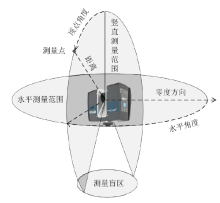
地面三维激光扫描系统主要由激光发射器、接收器、反射镜、时间计数器(鉴相器)以及控制电路等组件构成, 用来获取被测物体表面三维坐标和反射光强度。如今的地面三维激光扫描系统还利用高分辨率相机对扫描之后的场景进行全景拍摄, 通过贴图或者映射等手段获取表面纹理及色彩信息, 图1为地面三维激光扫描系统的工作示意图。
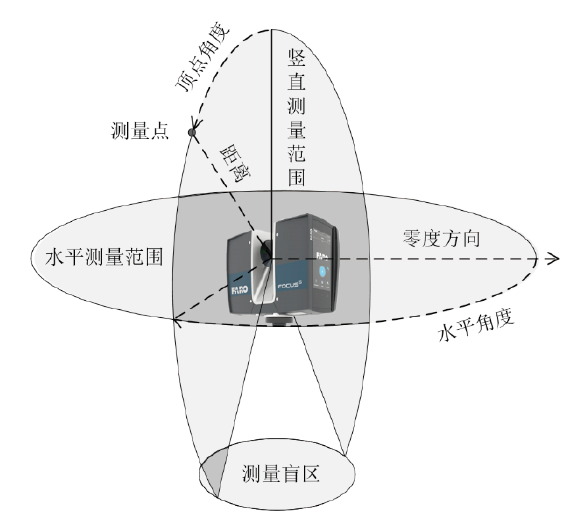 | 图1 地面三维激光扫描仪工作示意图Fig.1 Schematic for terrestrial 3D laser scanner to work into functions |
如图1所示, 激光发射器产生的激光束经过高速旋转的反射镜片的引导获得竖直测量范围、利用平台自身的转动获得水平测量范围, 期间, 时间计数器捕捉漫反射的脉冲信号获取不同点位的反射时间差(相位差), 进而计算点位距离, 控制电路的时钟编码器会记录脉冲信号的水平角度α 和竖直角度θ , 最后通过公式(1)将记录点位的极坐标转换为空间三维坐标。

受限于TLS测量范围以及光学特性, 现场勘查往往需要依据地形、地物的分布特征, 综合时间和采样密度等因素确定作业范围和摄站的布设方案。摄站的布设一般遵循的原则:1)尽可能地避免扫描盲区的出现。2)在保证测量需求的前提下合理安排摄站位置, 尽可能地减少摄站数量, 以减少不同摄站数据拼接带来的误差。3)考虑摄站周边的交通环境, 尽量避免引入行人、车辆等运动目标的噪声干扰[10]。
此外, 为了保证不同摄站数据的准确拼接, 需要人工布设标靶提供拼接同名点, 参考测绘行业指导标准《地面三维激光扫描作业技术规程》(CH/Z 3017-2015)可知:单一摄站内的标靶数量应不少于4个、相邻两摄站之间的同名标靶数量应不少于3个, 同时, 标靶的布设应均匀且高低错落[11]。
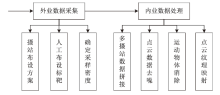
外业测量获取的原始数据包含有点云坐标数据和影像数据, 单一摄站所在局部坐标系的方位未知且难以反映现场全貌, 因此有必要将多摄站点云数据统一至绝对坐标系统, 常规的方法是借助同名靶标来实现。通过多摄站的数据拼接可以有效地剔除障碍物以及行人、车辆等运动目标的干扰噪声, 最后将几何校正后的影像数据映射至三维点云即可获取包含纹理数据的点云全景图。地面三维激光扫描仪的工作流程如图2所示。
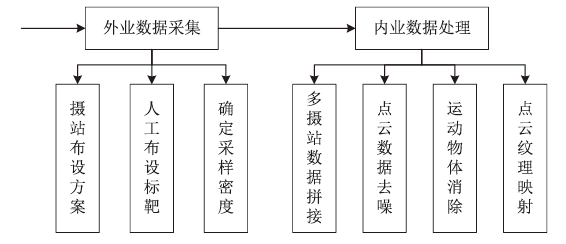 | 图2 地面三维激光扫描仪工作流程Fig.2 Workflow of a terrestrial 3D laser scanner |
交通事故现场勘查是交通事故处理的重要组成部分。根据弗吉尼亚州交通研究委员会的研究报告, 在美国, 大约有25%的交通堵塞是由于交通事故引起的[12]。另有研究显示, 交通事故现场每持续一分钟, 发生二次事故的风险就会增加2.8%[13]。因此, 准确、快速的现场勘查不仅对交通事故调查、责任认定具有重要意义, 同时也可以有效防止二次事故, 降低经济损失。
交通事故现场勘查的目的之一是形成交通事故现场图, 它也是事故案卷中的核心材料之一, 传统的手工绘制的方法需要勘查人员边测量、边绘制、边标注, 导致交通事故现场图存在比例失调、精准度欠佳等问题。Pagounis等[14]利用Leica HDS2500地面激光扫描仪获取事故现场点云数据, 并在CAD环境中绘制现场平面图, 研究表明地面三维激光扫描仪的方案具有可以快速清理交通事故现场、有效缩短交通中断时间以及永久保存事故场景等优势。同济大学金雯[15]利用三维激光扫描技术对交通事故现场进行快速处理, 在模拟实验中, 现场数据的采集仅耗时15 min。英国运输研究实验室的Forman等[16]提出事故现场的三维点云可以作为构成二维或三维CAD平面图的基础数据, 同时也指出在当时还没有专门为交通执法定制的激光扫描软件。2014年FARO在收购CAD Zone的基础上推出了FARO Zone, 包含2D和3D两个版本, 主要面向交通事故、刑事犯罪和火灾调查等领域, 其中3D版本重点从三维视角出发, 关于Zone 3D在交通事故领域的应用将在下节具体论述。此外, 为了满足用户的工程绘图需要, 各大软件厂商都推出了与AutoCAD绘图环境的交互模块, 如Leica的CloudWorx for AutoCAD、FARO的PointSense以及SCENE的DrawToCAD等, 利用这些插件可以很方便地在点云数据中勾绘出精准的交通事故现场图。图3a是作者模拟事故现场的点云正视图, 图3b是利用DrawToCAD勾绘的交通事故现场图。
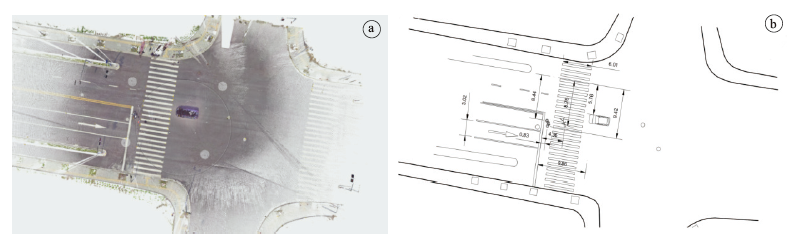 | 图3 事故现场点云正视图(a)和DrawToCAD勾绘的现场图(b)Fig.3 Front-view of accident scene presented with point cloud (a) and scene drawn with DrawToCAD (b) |
现实情况下, 交通事故现场还会存在着复勘的需求[17], 但由于交通事故现场的高度开放性, 遗留在现场的散落物、轮胎印痕等物证信息往往不复存在, 给事故、案件的调查造成了一定的困扰。传统的基于近景摄影测量方法通常只能解决平面测量, 而将复勘获取的点云数据与第一现场的勘查照片进行匹配, 还可以对丘陵等复杂地形下的物证进行有效定位, 如果校正相机畸变, 其平均定位误差可小于10 cm[18]。但点云数据与影像数据的自动匹配涉及数据降维、特征匹配以及透视成像等理论, 技术难度较大, 现阶段可以借助诸如3DS Max等软件人工实现数据的匹配融合。未来, 随着TLS系统在交通事故勘查中的应用和普及, 上述现场复勘的作业方案也有望应用于交通事故第一现场的快速处理。
地面三维激光扫描系统能够真实记录事发现场的三维场景数据, 借助三维场景进行仿真再现已经在事故调查、诉讼活动中得以应用, 并且展现出良好的发展前景。Poole等[19]利用RIGEL LMS-Z210扫描仪和ISiTE三维分析软件对一起车辆失控并导致侧翻的事故进行了动力学仿真计算, 将生成的事发路段的地形曲面模型数据导入HEV(human environment vehicle)三维仿真环境中分析涉案车辆的速度信息。DSD公司开发的PC-CRASH自10.1版本也引入环境和车辆点云数据以期达到事故仿真过程逼真再现的目的, PC-CRASH允许加载包含位置信息或附加色彩信息形式的点云, 值得一提的是, 仿真所涉及的车辆模型是通过将点云数据以贴图的形式贴附在车体表面的形式实现, 此时的车辆具有动力学响应, 能够进行各种受力状态的反馈。本文利用PC-CRASH对某道路发生的一起真实交通事故在三维点云场景中进行事故仿真, 仿真的效果如图4所示。
 | 图4 三维点云场景下的事故仿真效果Fig.4 The effected accident scene simulated in 3D point-cloud scenario |
不同于传统的事故仿真软件, FARO Zone 3D对交通事故场景的支持较为强大, 包含有道路模型、Google地图以及点云等多种数据类型, 除了允许用户以常规视角观察三维场景, 还提供了在虚拟现实中漫游事故现场的功能。Zone 3D通过自带的碰撞分析工具解决车辆状态求解问题, 但是目前仅支持拖滑、追尾、侧翻等简单事故类型, 为了提高交通事故分析再现能力, Zone 3D还提供了利用事件数据记录器(event data recorder, EDR)、HEV、Virtual Crash和PC-CRASH等车辆状态数据进行仿真的交互接口, 能够自动定位和生成车辆的路径信息。总体来说, 现有的事故过程实景再现大都仅是将点云数据作为场景模型进行输入, 鲜有涉及点云数据的分类分割与场景理解, 而后两者是实现交通事故过程高水平实景再现的关键。
交通事故遗留在车辆或人体等相关物体上的形态特征对于分析事故过程具有重要意义。通用和丰田等汽车厂商与科研机构都开展过针对道路交通事故研究的实车碰撞试验, 尝试从动力学分析角度还原车辆碰撞过程, 如美国国家高速公路安全管理局利用车辆变形量计算等效速度变化量, 其难点在于变形量的精确测量和等效模型的建立[20]。Chapman等[21]利用Optech ILIRS-3D地面激光扫描系统获取车身轮廓数据, 通过与样车数据的拟合、比对, 分析量化车辆在水平与垂直平面的三维位移矢量, 同时也提到了借助TLS采集的密集点云可以建立更加精确的车体非线性变形模型。江苏大学的王洪宝等[22]注意到CRASH准则在垂直方向上适用性欠佳的问题, 其对上侧、纵梁以及下侧三个部位的变形赋予不同的权重系数, 利用三维激光扫描技术, 在Geomagic软件中实现事故车与原型车点云的自动配准, 可以很方便地计算得到所谓的车辆三维等效变形量。Dima等[23]依据DSD公司2014年在奥地利林茨开展的全尺寸实车碰撞试验进行基于点云数据的PC-CRASH仿真研究, 通过三维扫描技术评估事故碰撞过程中的能量损失, 试验车辆的状态真值为EDR事件数据, 试验表明仿真结果与现场实际情况相当接近, 同时也从侧面验证了三维激光扫描技术在事故车辆变形量精细建模方面的优势。
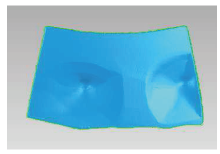
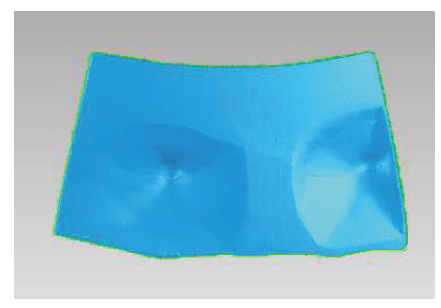
车体的变形是事故过程的宏观表现, 能够直观体现事故碰撞形态、剧烈程度等信息, 而车辆的某些特定部位、结构的状态信息对于事故调查分析同样具有特殊的价值。汽车与行人或骑行人事故依然是我国致死率较高的交通事故类型, 2009年清华大学汽车安全与节能实验室的许骏等[24]基于PVB夹层风挡玻璃的材料特点, 提出了利用风挡玻璃凹陷量求解事故车辆速度的计算模型, 此后, Chen等[25]开展了基于三维激光扫描仪重建风挡玻璃曲面的工作, 通过对风挡玻璃点云的样条拟合处理获取变形区域的三维NURBS曲面, 如图5所示, 可以准确提取风挡玻璃的最大变形深度以及冲击变形面积等信息, 为事故分析重建提供了一种新的思路。武汉理工大学和公安部交通管理科学研究所在利用三维激光扫描技术分析车辆碰撞角度的研究方面也取得了一定的成果[26]。
除此之外, 针对涉及人体损伤的道路交通事故, 从损伤检验、致伤机制等角度开展事故调查分析也是目前的研究热点, 国内主要从事该方面研究的有司法鉴定科学研究院、第三军医大学等, 同样有将地面三维激光扫描技术应用于交通事故重建的实践[27], 这里不再展开。整体来看, 无论开展车体变形还是人体损伤的参数测量, 事故分析重建依然需要借助动力学、运动学以及有限元建模等手段, 因此, 其难点在于利用精细化参数数据优化事故重建理论模型, 从而达到提升事故重建精确度的目的。
利用视频图像开展交通事故涉案车辆的运动状态重建是目前的研究前沿, 视频图像具有检材丰富、准确直观等优势, 但是由于成像过程深度信息的缺失, 车辆状态重建结果往往局限于二维平面, 目前最新的探索方向是借助地面三维激光扫描技术, 将车辆状态数据的解算由二维平面拓展到三维空间。
地面三维激光扫描产生的数据可以看作是对场景空间的密集采样, 而视觉传感器成像过程就是包含空间量化和幅度量化的一系列采样过程, 因此, 通过三维点云数据与视频图像的配准, 理论上可以获取图像中任一像素点的空间位置。具体地, 点云数据与静态图像的配准多应用于事故现场的勘查[17, 18], 而与动态视频结合则可应用于解算涉案车辆的运动状态信息。Neale等[28]基于路侧监控开展了提取目标物空间位置和速度信息的试验研究, 试验地点为一十字交叉路口, 设计了车辆、骑行人以及行人等研究对象, 其整体思路是首先利用TLS采集试验路段的空间点云数据, 其次将PF-Track跟踪到的二维像素坐标映射至三维点云, 进而获取目标特征的空间位置序列, 最后与目标物体搭载的V-BOX数据进行比对分析, 试验结果证实了该方法的有效性与准确性且受视频质量的干扰较小。
车载监控记录的行车录像同样是开展车辆运动状态重建的重要材料, 将行车影像与点云数据进行配准可同时解算自车和视野中环境车辆的运动状态, 环境车辆的求解与Neale的方法[28]类似, 即借助点云获取二维像素对应的空间位置, 而自车运动状态的求解则通过反求相机的空间位置实现, 本文采集的行车画面如图6a所示, 行车影像与本文采集的点云进行配准的效果如图6b所示。
 | 图6 车载监控记录的行车画面(a)和三维点云中的相机状态匹配(b)Fig.6 One screen view shot from the vehicle’ s driving video recorder (a) and the instant camera’ s state matching with 3D point cloud (b) |
图6b中黄色相机模型为反求的图6a时刻的相机空间位置。相机空间位置的反求主要涉及立体视觉领域经典的PnP(perspective n point)问题, 其核心在于利用三维点云与二维图像之间的同名点对开展相机位姿求解, 该类算法广泛应用于视觉SLAM领域, 经典的位姿估计算法如EPnP[29](efficient PnP)、UPnP[30](uncalibrated PnP)以及OPnP[31](optimal PnP)等。值得一提的是, 3DS Max可以利用点云数据和图像的配准实现相机位置、方位和镜头参数的计算。Manuel等[32]对行车影像与航空摄影、全站仪以及三维激光扫描获取的环境数据分别进行配准分析, 并与差分GPS记录的车辆状态数据进行比对, 试验结果显示三维激光扫描数据的精度最高, 自车行驶速度的重建平均误差为2%, 环境车辆的重建平均误差也仅为2.4%, 重建精度足以满足交通事故调查需要。
目前, 地面三维激光扫描系统的测量精度和采样速度均已达到较高水平, 其高精度、非接触、自动化采集等技术特点也为交通事故领域带来了新的作业方式和再现视角。但同时, TLS技术在道路交通事故中的应用还有以下问题值得思考。
TLS技术在交通事故重建中的应用整体还停留在对涉案物证外廓的精细建模阶段, 较为依赖传统的重建理论和方法, 而受限于测量手段, 传统方法多理想化、简单化处理, 利用TLS技术可以优化出解释能力更强的计算模型, 例如车体变形量的非线性表达等, 另一方面, 借助TLS测量手段, 也可以根据事故调查需求, 开发出新的特征参数计算方法。
结合TLS点云与视频图像数据是最新的发展方向, 其不仅能够解决事故现场物证定位, 还能够解算车辆运行状态信息。虽然现有的研究成果[28, 32]显示其已经达到了较高的精度, 但是研究涉及的交通事故场景较为单一, 且没有对影响车辆运行状态解算的变量进行系统分析, 例如图像畸变校正误差、特征点高度以及场景点云数据密度等, 需要下一步开展试验验证。
TLS技术在国内交通事故领域的标准、技术规范相对滞后, 目前仅《道路交通事故现场图绘制》(GA/T 49-2019)对交通事故的现场绘图有所提及, 未来需进一步加强TLS技术在交通事故勘查和重建中的标准化工作, 以确保道路交通事故调查与重建的质量。
TLS技术开展交通事故勘查的优势在于场景还原度高, 但其事故勘查时效的优势并不明显。以笔者单位利用TLS开展事故现场勘查的实际来看, 涉及多摄站拼接的外业测量时间普遍超过30 min, 此外, 交通事故现场的开放特性容易引入运动目标噪声, 后续的内业处理环节仍需花费较多精力进行点云数据的精修。
现阶段TLS系统的价格仍较为高昂, 且需要配套点云数据处理的硬件设备和软件环境, 同时对使用人员的专业知识要求较高, 需要具备一定的交通事故工程学以及计算机视觉专业基础。目前将TLS技术应用在一线事故处理部门尚不成熟, 相关单位亦可结合自身工作需要与人员配置情况利用TLS系统开展道路交通事故勘查和事故重建工作。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
|
| [30] |
|
| [31] |
|
| [32] |
|