


{kind=link}
{kind=link}
{kind=link}
{kind=link}
以欧拉角衡量膝关节运动稳定性初探
[邓宏明 , 任璐, 姚力, 杨文博
, 任璐, 姚力, 杨文博* ]
, 任璐, 姚力, 杨文博]
|
|


第一作者简介:邓宏明,男,湖南邵阳人,硕士研究生,研究方向为痕迹检验技术。E-mail: dhmlcw@foxmail.com
目的 以欧拉角衡量膝关节在三维空间的运动及其稳定性,为研究步态分类提供理论基础,为步态识别技术提供新的步态特征。方法 使用Codamotion三维动作捕捉系统捕获受试者自然行走20趟的动作,导出左右膝关节各欧拉角(内收外展角度、内旋外旋角度、屈伸角度)的值,以此探讨膝关节的运动情况。结果 同一人自然行走多趟膝关节欧拉角的Spearman相关性 r有88.60%在高相关性程度范围内,有11.40%在显著相关性程度范围内。双足支撑阶段的后支撑腿和单足支撑阶段的摆动腿膝关节内收外展与屈伸运动的稳定性分别强于双足支撑阶段的前支撑腿和单足支撑阶段的支撑腿,而双足支撑阶段的前支撑腿和单足支撑阶段的支撑腿膝关节内旋外旋运动的稳定性则分别强于后支撑腿和摆动腿。结论 同一人自然行走多趟膝关节运动具有一定的稳定性。
Objective To measure the motion and stability of knee joint in three-dimensional space with Euler angles so as to provide a theoretical basis for gait classification and recognition with new-discovered gait features.Methods The Codamotion three-dimensional motion capture system was used to record the movement and activity confine around the marked legs’ sites of the subject who made 20 rounds of natural walking course, thereby having calculated the Euler angles (X: of adduction and abduction, Y: of internal and external rotation, Z: of flexion and extension) of left and right knee joints. The knee joints were therewith explored of their sports situation.Results Through Spearman analysis being conducted into the calculated Euler angles of knee joints from same person who made multiple rounds of walking course, the coefficient r was received with its 88.60% falling into high correlativity scope and the remaining 11.40% leaving among the significant correlation degree. During the period of single-foot/bipedal support, the swinging/rear-supporting leg led out more stable Euler angles X and Z of knee joint than the supportive/front-supporting leg whose Euler angle Y was yet more steady.Conclusion Same person, when naturally walking into rounds of course, is able to maintain his/her knee joint movement within a certain degree of stability.
膝关节是参与人行走运动的主要关节之一, 是步态特征的重要来源。在步态识别技术中, 膝关节运动的稳定性越强, 从膝关节处所获得的步态特征越可靠, 步态识别的准确率也就越高。人的行走运动发生在三维空间, 对三维空间中膝关节运动及其稳定性的研究, 不仅能够为步态识别技术提供新的、可靠的步态特征, 同时也为步态分类研究提供新的思路。
欧拉角能有效描述物体在三维空间中的运动情况, 在航海、航空、机械等领域有着广泛的应用[1, 2, 3, 4]。我国单大卯[5]在1991年从理论上对用欧拉角描述人体髋关节运动的可行性进行了探讨论证。国际生物力学协会(ISB)[6]在2002年发表了人体关节运动中各种关节的关节坐标系定义的建议, 该建议中选择使用旋转顺序的欧拉角度来衡量人行走运动时各关节的活动度, 包括绕x轴旋转的角度、绕y轴旋转的角度以及绕z轴旋转的角度, 然而上述研究未对用欧拉角衡量膝关节在三维空间的运动及稳定性情况进行实证。虽然朱忠林[7]利用二维动态X线透视影像与膝关节三维模型对膝关节在三维空间运动的测量方法进行了探索, 李文浩等[8]通过欧拉角研究人体关节活动度测量系统, 但是其研究旨在测量三维空间中膝关节的活动度, 并未对膝关节在三维空间运动的稳定性进行深入阐述。
在三维空间中, 可自由移动的刚体具有六个自由度, 其中三个可以与平移运动相关联, 另外三个可以与旋转相关联[9]。为探索三维空间中膝关节运动及其稳定性情况, 根据国际生物力学协会的建议, 可选择三维空间中与旋转相关联的欧拉角开展研究。而使用Codamotion 三维动作捕捉系统[10]捕捉人行走时的动作, 将大腿和小腿定义为刚体, 不仅可以直接获得三个与旋转相关联的膝关节的欧拉角, 还能实时记录膝关节欧拉角随时间的变化情况, 有效分析膝关节在三维空间运动及稳定性情况, 为初步探讨以欧拉角衡量膝关节运动及其稳定性提供依据。
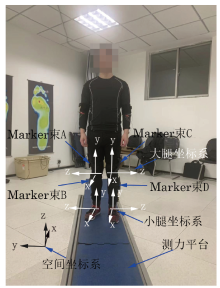
利用Codamotion三维动作捕捉系统, 先以人行走的前进方向为x轴; 其次以膝关节内侧髁和外侧髁创立膝关节中心点, 以踝关节内侧和外侧创立踝关节中心点; 再以踝关节中心点至膝关节中心点为y轴, 踝关节内侧到踝关节外侧为z轴, 定义小腿的坐标系; 然后以膝关节中心点到大转子为y轴, 以膝关节内侧到膝关节外侧为z轴, 定义大腿的坐标系; 最后, 以大腿和小腿的坐标基础所得的相对角度即为膝关节欧拉角。大腿坐标系和小腿坐标系如图1所示。
 | 图1 坐标系及实验环境图Fig.1 Coordinate system setup and experimental environment |
膝关节的运动方式主要有屈伸、内收外展以及内旋外旋运动。结合临床医学上定义膝关节运动方式的原理, 可用膝关节欧拉角定义人自然行走时膝关节的运动方式:用绕z轴旋转所得的欧拉角Z表示膝关节的屈伸角度, 以此衡量膝关节的屈伸运动; 用绕x轴旋转所得的欧拉角X表示膝关节的内收外展角度, 以此衡量膝关节的内收外展运动; 用绕y轴旋转所得的欧拉角Y表示膝关节的内旋外旋角度, 以此衡量膝关节的旋转运动。对所获得的欧拉角进行数理统计分析, 即能判断膝关节在三维空间运动状态及稳定性。
以某大学一男性志愿者作为研究对象, 该研究对象年龄为23岁, 身高174 cm, 体重为75 kg, 自然行走无障碍, 身体无疾病(个人信息经同意公开)。
英国Charnwood Dynamics公司研发的Codamotion三维动作捕捉系统(最高采集频率5800 Hz, 误差0.05 mm), 比利时RSscan公司研发的Footscan系统(足底压力步态分析系统)、测力平台(长2 m), Marker束, Marker盒, Marker枪, 打点计时器, 无花纹底鞋, 紧身衣裤。
首先, 将Codamotion三维动作捕捉系统与Footscan足底压力步态分析系统启动, 使两台设备关联同步后, 校正Footscan足底压力步态分析系统的测力平台, 建立Codamotion三维动作捕捉系统的三维空间坐标系; 其次, 让受试者穿上紧身衣裤和无花纹底鞋, 在受试者右边大腿和小腿分别绑上A号Marker束和B号Marker束, 左边大腿和小腿分别绑上C号Marker束和D号Marker束, 左右脚分别贴上Marker点, 将大腿、小腿和脚定义为刚体; 然后, 用Marker枪在左右膝关节内侧髁和外侧髁、大转子、踝关节内侧和外侧、第五跖骨处、第一跖骨处打上虚拟Marker点; 最后, 将打点计时器节拍设置为95次/分, 让受试者根据打点计时器的节拍在测力平台上自然行走20趟, 并记录两台设备之间的时间差。
通过SPSS 24.0软件对采集的数据进行统计分析。具体方法为分别使用K-S正态检验方法和散点图对受试者膝关节欧拉角进行正态分布性检验和单调性分析; 对受试者分别在一个步态周期内和在不同阶段内随机一次行走与其余次数行走膝关节欧拉角进行Spearman相关分析, 数据结果分别表示为Spearman相关系数r的值和Spearman相关系数r在不同相关性程度范围内的百分比, P< 0.05为差异有显著性意义; 统计受试者右足支撑不同时相膝关节欧拉角的平均值、标准差和变化范围的值。
选取左足足跟踏上测力平台到左足足跟再次接触测力平台时作为一个步态周期, 即以人们常说的“ 迈两步” 作为一个步态周期, 收集Codamotion三维动作捕捉系统采集的膝关节处欧拉角数据。由于Codamotion三维动作捕捉系统和Footscan足底压力步态分析系统之间存在时间差, 应删除这段时间所获得的数据, 以保证受试者每次行走时左足足跟踏上测力平台的时间一致。受试者自然行走20躺, 左膝欧拉角随时间变化情况如图2所示, 右膝欧拉角随时间变化如图3所示。经K-S正态检验方法和散点图分析, 受试者任意两次行走膝关节欧拉角的数据不呈正态分布, 但是随机选取受试者两次行走膝关节欧拉角之间的散点图呈单调性, 故使用Spearman相关分析方法, 分析受试者随机一次行走(T1)与其余十九次行走(T2~T20)在一个步态周期内膝关节欧拉角之间的相关性, 结果如表1所示。
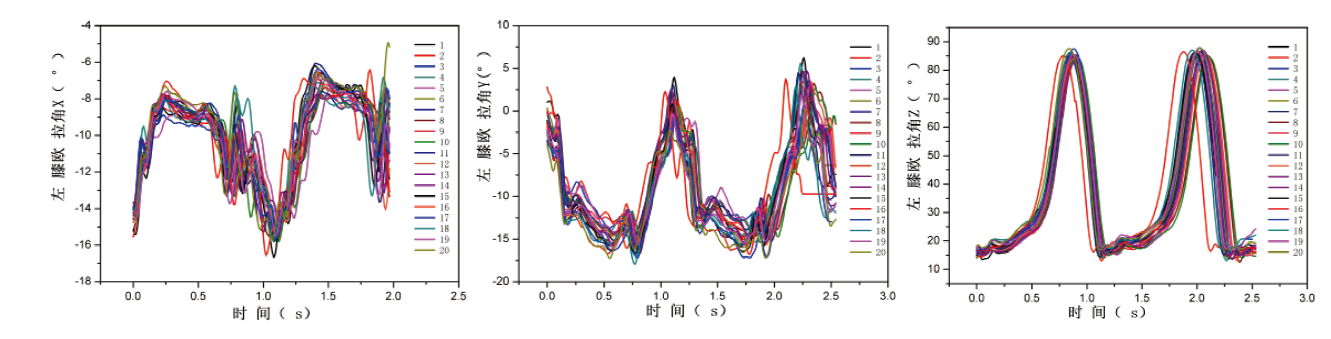 | 图2 左膝欧拉角X、欧拉角Y、欧拉角Z随时间变化情况Fig.2 Euler angles X, Y and Z of the moving left knee joint changing with time |
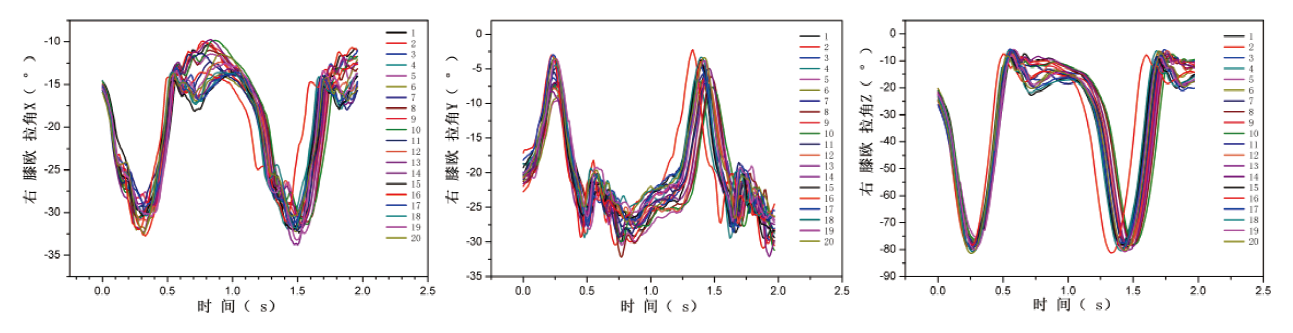 | 图3 右膝欧拉角X、欧拉角Y、欧拉角Z随时间变化情况Fig.3 Euler angles X, Y and Z of the moving right knee joint changing with time |
| 表1 一次行走与其余十九次行走之间膝关节欧拉角的Spearman相关系数r Table 1 Spearman correlation coefficient r with Euler angles of knee joints in moving between the first and the other each one from the rest nineteen walking courses |
由图2和图3可知, 受试者自然行走多趟左右膝关节欧拉角X、欧拉角Y和欧拉角Z随行走时间变化趋势基本一致, 且呈一定的周期性。分析表1中的数据可知, 受试者随机一次行走与其余十九次行走在一个步态周期内, 左右膝关节欧拉角随行走时间变化之间的Spearman相关系数r有88.60%在高相关性程度范围内(0.8< r≤ 1, P< 0.01), 有11.40%在显著相关程度范围内(0.5< r≤ 0.8, P< 0.01), 说明左右膝关节各欧拉角随时间变化保持着一定的稳定性, 即人自然行走时, 膝关节的屈伸、内收外展以及内旋外旋运动相对稳定。
由于受试者在第十六次行走时的速度明显快于打点计时器节拍的速度, 而第十六次行走与第一次行走左右膝关节各欧拉角之间的Spearman相关系数r大多低于其余各次行走与第一次行走之间的Spearman相关系数r, 且由图2和图3可以看出第十六次行走的变化曲线与其他曲线相比有一定的偏差, 说明行走速度的快慢可能对膝关节运动的稳定性有一定的影响。
由图2和图3可知, 受试者在右膝欧拉角X和右膝欧拉角Z随时间变化情况的图中出现了阶段性曲线重合度较差的情形, 为探讨该现象出现的原因, 将受试者的行走过程分五个时相以及不同支撑阶段, 以此分析膝关节运动的稳定性情况。Footscan足底压力步态分析系统将人行走过程中单足依次分为IFC(足跟刚开始着地时相)、IMC(足掌刚开始着地时相)、IFFC(足趾刚开始着地时相)、HO(足跟刚开始离地时相)、LFC(足趾刚开始离地时相)五个时相, 则可将受试者自然行走一次分为图4所示的不同阶段。
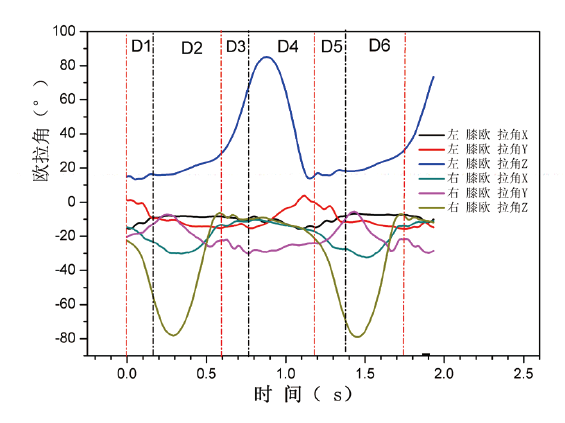 | 图4 受试者自然行走一次的不同阶段Fig.4 Different stages of subject’ s natural gait in one-cycle walking |
图4中第一条和第三条红色虚线代表左足的IFC时相, 第二条和第四条红色虚线代表右足的IFC时相; 第一条和第三条黑色虚线代表右足的LFC时相, 第二条黑色虚线代表左足的LFC时相。图4中D1与D5为左足在前右足在后的双足支撑阶段, D2与D6为左足单支撑的阶段, 此时右足处于摆动阶段; D3为右足在前左足在后的双足支撑阶段, D4为右足单支撑阶段, 此时左足处于摆动阶段。由于人的行走具有周期性, 结合图2和图3中曲线阶段性重合度较差的区域大多在D3和D4阶段, 故考察D3和D4阶段的膝关节欧拉角随时间变化情况, 计算这两个阶段随机一次行走与其余十九次行走膝关节欧拉角的Spearman相关系数r在不同相关性程度范围内的百分比, 如表2所示, 以此探讨膝关节运动的稳定性。
| 表2 D3和D4阶段膝关节欧拉角的Spearman相关系数r在不同相关性程度范围内的百分比 Table 2 Different correlativity-related percentages measured of Spearman correlation coefficient r with Euler angles of knee joints in D3 and D4 stages |
由表2可知, 该名受试者在D3阶段时, 左膝欧拉角Z的Spearman相关系数r全部位于高相关程度范围内(0.8< r≤ 1, P< 0.01), 说明在双足支撑阶段, 膝关节的屈伸运动比较稳定。在D3和D4两个阶段, 左膝欧拉角X和左膝欧拉角Z的Spearman相关系数r在高相关程度范围内的百分比均高于右膝欧拉角X和右膝欧拉角Z, 而左膝欧拉角Y的Spearman相关系数r在高相关程度范围内的百分比低于右膝欧拉角Y。由此表明, 在双足支撑阶段, 在前的右腿膝关节内收外展与屈伸运动的稳定性弱于在后的左腿膝关节, 而在后的左腿膝关节内旋外旋运动的稳定性弱于在前的右腿膝关节; 在单足支撑阶段, 摆动的左腿膝关节内收外展与屈伸运动的稳定性强于支撑的右腿, 支撑的右腿膝关节内旋外旋运动的稳定性强于摆动的左腿。
通过记录受试者在测力平台右足各个时相膝关节的欧拉角, 统计五个时相各膝关节欧拉角的平均值、标准差以及变化范围, 以此评价在不同时相里膝关节运动的稳定性, 统计结果如表3所示。
| 表3 右足支撑不同时相膝关节欧拉角统计值(° ) Table 3 Statistics of Euler angles of knee joints in different phases during right-foot supporting (º ) |
由表3可知, 在右足的五个时相里, IFC和LFC时相膝关节各欧拉角的标准差和变化范围大多低于其他三个时相, 说明单足在足跟刚着地时相与足趾离地时相膝关节屈伸角度、内收外展角度以及内旋外旋角度相对稳定。左膝欧拉角X、右膝欧拉角X、左膝欧拉角Y、右膝欧拉角Y在右足的五个时相里的标准差值和变化范围均较小, 说明左右膝关节在这五个时相时的内收外展角度和内旋外旋角度较稳定, 即在单足的不同时相里, 膝关节的内收外展角度与内旋外旋角度均具有一定的稳定性。在右足的HO时相里, 左膝欧拉角Z的标准差为15.97° , 变化范围为47.28° , 明显高于其他时相标准差和变化范围, 且远远超过同时相右膝欧拉角Z的标准差和变化范围。因为右足的HO时相位于左足的IFC时相与右足的LFC时相之间, 由图4可知, 此时受试者右足的HO时相位于左足在前右足在后的双足支撑的D5阶段, 与前文右足在前左足在后的双足支撑的D3阶段膝关节屈伸运动稳定性情况一致, 均是前支撑腿膝关节的屈伸运动稳定性弱于后支撑腿。
通过Codamotion三维动作捕捉系统所获得的人行走时膝关节的欧拉角, 可有效衡量膝关节在三维空间的运动情况, 同一人自然行走多趟时膝关节内收外展、内旋外旋以及屈伸运动均具有一定的稳定性。在双足支撑阶段, 后支撑腿膝关节内收外展与屈伸运动稳定性强于前支撑腿, 而前支撑腿膝关节的内旋外旋运动稳定性强于后支撑腿。在单足支撑阶段, 摆动腿膝关节内收外展与屈伸运动稳定性强于支撑腿, 但是支撑腿膝关节的内旋外旋运动稳定性强于摆动腿。这不仅为研究人自然行走时膝关节在三维空间中的运动提供依据, 为步态识别技术提供新的步态特征, 同时也为步态分类提供理论基础。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|