

{kind=link}
{kind=link}
{kind=link}
视频方法鉴定车速的准确性研究
[贾常明 , 吴文龙, 王乾, 王永第, 王玉乐]
, 吴文龙, 王乾, 王永第, 王玉乐]
, 吴文龙, 王乾, 王永第, 王玉乐]
|
|


第一作者简介:贾常明,男,吉林农安人,硕士,副教授,研究方向为交通事故司法鉴定。E-mail:jcm12367@126.com
目的 通过实验研究用视频方法鉴定车速结果的准确性及其影响因素。方法 在选定的实验场地上,让实验车辆以一定速度匀速通过一段距离,使用高空、垂直、斜角和车载四个位置的摄像机同时录制,将车速计算结果进行比较。结果 理论和实验数据分析表明,误差的大小主要取决于:车速和帧速率,车体上参考点和路上参考点的对齐效果,还有行车距离的大小和播放器屏幕的大小等。结论 用视频方法进行车速鉴定,相对于传统的用力学公式进行计算,其准确性和可信度较好;一般条件下,误差可在5%~10%之间估算;夜晚条件下,可在车灯的轮廓线上选择车体上参考点,炫目情况除外。
Objective To test the accuracy of determining vehicle speed by the involved video and explore the influencing factors.Methods At the selected field, the experimental vehicle was driven at a constant speed across a distance, with its moving course being recorded by four cameras that had been fixed at different positions (1: a site at the high storey of a building beside the road that the vehicle rolled past; 2: a side place vertical/slanting to the road; 3: the vehicle-carried tachograph). Based on the frames and elapsed time from the recorded videos, the vehicle’s speed was respectively measured and compared.Results From the analysis of relevant theory and experimental data, the metrical errors mainly relate to the vehicle’s speed, video’s frame rate, aligning accuracy of the reference points selected on the vehicle against the ones on road, the vehicle-rolled distance, and the screen size of the video-playing machine.Conclusions In contrast with the traditional mechanical approach, vehicle speed determination by the involved video is of both better accuracy and reliability, with the average error between 5% and 10%. For the night circumstance, the reference points on the vehicle had better choose around the contour of the vehicle’s lights with the exception of dazzling.
车速鉴定是交通事故司法鉴定中的典型问题。传统的鉴定方法有[1]:1)利用路面刹车痕迹长度方法, 通过动能定理来进行计算。但随着防抱死技术的普及, 车辆在刹车过程中, 在路面上留下显著痕迹的较少, 现场情况也比较复杂。2)利用行人抛距方法, 即把汽车和行人碰撞看成质点碰撞(完全非弹性碰撞), 行人碰撞后发生平抛运动, 这种方法理论和实际有很大差距。3)利用动量守恒定律方法, 对于车辆之间的碰撞, 把二车看成质点碰撞, 建立碰撞前后的速度关系式, 再利用动能定理, 求得碰撞后的车速(车辆与路面的摩擦功消耗了碰撞后的车辆动能), 进而求得碰撞前的车速。4)利用车体变形程度方法, 根据车辆碰撞试验取得的经验公式, 即车辆变形程度与有效碰撞速度的关系式。5)利用pc-crash软件进行再现分析, 可求得车速。
近些年, 由于摄像监控的广泛应用, 交通事故发生前车辆的行驶被记录下来, 既有路边固定摄像监控, 也有车载行驶记录仪。于是有关部门制定了鉴定标准— — 《基于视频图像的车辆行驶速度技术鉴定标准》(GA/T1133-2014)。其出发点是利用速度的定义来计算车速, 即v=s/t。利用视频鉴定车速也受现场条件的限制, 典型问题是距离长, 得到平均速度, 距离短, “ 误差” 要大。此外还可能受拍照角度、距离等因素的影响。自2000年起, 通过使用博世碰撞数据获取产品CDR(Collision Data Record)获取事故数据记录(Event Data Record, EDR)信息的方法可以获取碰撞前5 s内的车速。近年来, 国内一些鉴定机构使用该方法进行车速鉴定, 由于受库容等因素的影响, 还没有广泛应用。无论哪种方法, 刨除科学性之外, 面对交通事故执法的需要, 一个关键的问题是, 鉴定结果的“ 误差” 范围问题。一般交通管理中的限速为30、40、50、60、70 km/h等, 如果鉴定结果为55或58 km/h, 是否会超过限速60 km/h?为此, 我们针对视频鉴定车速方法, 通过实验来研究鉴定结果的“ 误差” 范围以及不同摄像条件的影响, 通过实验数据使人们认识视频方法鉴定车速的准确性。
参考点的选择实际是解决“ 距离” 问题[2]。1)可以选择路面或路边上A、B两点间距离, 看车体上某一点C经过A、B两点间的时间。路面的两个参考点可以在路上的斑马线、分道线的端线选取, 路边的两个参考点可以在路旁的树干、路灯杆上等位置选取; 车体上某一点可以在轮胎、车灯、车体前缘、后视镜、出租车顶灯上选取。2)可以选择车体上A、B两点间距离, 看车体上A、B两点经过路面上一点C的时间。车体上的两个参考点可以在车体前后缘、前后轮胎中心、前后车灯附近选取; 路面或路边某一个参考点, 可以在路面标线的端线、路边的树干上选取, 常用的“ 参考点” 可在视频画面中画的虚拟线上选取, 即《基于视频图像的车辆行驶速度技术鉴定标准》(GA/T1133-2014)中提到的虚拟参考物。
目标车辆行驶一段距离的时间来源于视频中的时间显示(计时)。利用视频播放器播放视频时, 可以利用方向键来逐帧查看, 根据视频中目标车辆移动一段距离用了多少帧数来计算时间(帧数/帧速率)。帧速率一般为25、30、50帧/s。原则上需要对摄像设备的时钟进行校准, 但一般情况下误差不大。
摄像机的帧速率为N帧/s, 一帧经过时间t0=1/N s, 视频中目标车辆经过距离为l时, 经过帧数“ 正好” 为自然数n, 那么计算车速为v=l/(n t0); 但也会出现视频中目标车辆经过距离为l时, 经过帧数在n和n+1之间。车速应在v=l/(n t0)和v=l/[ t0 (n+1)]之间进行估算[3-4]。
主要误差的来源是对车辆的行驶“ 距离” 测量。两帧之间车辆移动距离相当于“ 尺子” 的最小刻度, 由帧速率和行车速度大小决定。帧速率大, 两帧之间车辆移动距离小; 车速大, 两帧之间车辆移动距离大。如车速为40 km/h, 帧速率为25帧/s, 两帧之间车辆移动距离为0.44 m, 若帧速率为50帧/s, 则移动距离为0.22 m。在摄像机上看车体上的参考点和路上的参考点“ 对齐” , 会存在误差(受边缘轮廓等影响), 有的条件下, “ 对齐” 较模糊。从不同角度、距离观察, 也存在“ 投影效应” , 使两个参考点之间的距离和目标车辆实际行驶距离不一致。
在实际案例中, 摄像机的距离、位置、角度可能对结果有不同的影响, 我们选择高空位置、垂直位置、斜角位置、车载等四个位置的摄像机同时进行录制。
2.1.1 实验地点
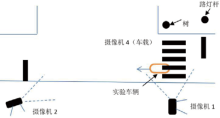
选择中国刑事警察学院院内刑技楼门前一段柏油路面, 双向双车道, 路宽8 m, 单向车道宽4 m; 路面上有斑马线, 停车线; 路边有树, 路灯杆等。图1为实验场地示意图。
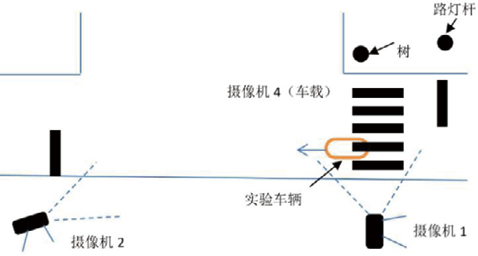 | 图1 实验场地示意图Fig.1 Schematic of the experimental field and setup |
2.1.2 实验器材
摄像机1是索尼FDR-AX100E, 分辨率:1 920× 1 080, 帧速率:50帧/s, 码率:48 Mbps; 摄像机2是佳能相机EOS550D, 分辨率:1 920× 1 080, 帧速率:25帧/s, 码率:44 Mbps; , 摄像机3是固定监控摄像机, 分辨率:1 920× 1 440, 帧速率:25帧/s, 码率:4 Mbps; 摄像机4是行驶记录仪, 分辨率:1 920× 1 080, 帧速率:30帧/s, 码率:14.7 Mbps。实验用车为小型乘用车, 视频播放器为迅雷播放器。
2.1.3 实验方法
实验中摄像机的位置如图1中所示。相对于图1中斑马线位置的目标车辆:摄像机1是近距离垂直角度放置, 距目标车辆垂直距约10~12 m; 摄像机2是在目标车辆的左前方(与目标车辆行驶方向呈斜向角度)放置, 距离目标车辆20 m以上; 摄像机3在车辆左侧距路边35 m远的五层楼上; 摄像机4是行驶记录仪, 在目标车辆的风挡玻璃上方, 录制目标车辆前方路况。实验车辆以图1中的方向路线行驶, 分别以30、40、50 km/h等行驶速度通过两个停车线之间(以仪表盘速度表指针为“ 参考车速” )。针对实验车辆同一次行驶情况, 分别计算四个摄像机的结果, 比较它们之间的差异。在上述场地中, 我们录制了6辆车的行驶情况, 4辆车在白天录制, 2辆车在夜晚录制。使用迅雷影音播放器在23寸电脑屏上进行播放。表1是实验车辆种类及有关数据。
| 表1 实验车辆有关参数 Table 1 Specific vehicles used and experimental plan |
各摄像机在不同条件下拍摄的视频图像见图2。图2a是摄像机1录制的“ 垂直” 观察结果, 在路面斑马线前后缘上选取路面两个参考点(路面长度:4.30 m), 在车体前缘或前轮上选取车体上一个参考点; 分别在车体前后缘(测量车身长度)、前后车轮中心选取车体上两个参考点(轮距)[3], 在虚拟线上选取路上一个参考点。图2b是摄像机2录制的“ 斜角” 观察结果, 在车体前后缘(测量车身长度)、前后车轮中心选取车体上两个参考点, 在虚拟线上选取路上一个参考点。图2c是摄像机3高空远距离观察效果, 在路面斑马线前后缘上选取路面上两个参考点(路面长度:4.30 m), 在车体前缘或前轮上选取车体上一个参考点; 分别在车体前后缘、前后车轮中心选取车体上两个参考点, 在虚拟线上选取路上一个参考点。图2d是车载行驶记录仪的观察效果, 在路面斑马线前后缘上选取路面两个参考点(路面长度:4.30 m), 在车体风挡玻璃上选取车体上一个虚拟参考点。图2e~2h是夜晚条件下, 对5号目标车辆的观察效果。图2f、2h经过亮度和对比度处理。表2是表1中4辆车的测量数据, 其他2辆车的测量数据结果类似。为说明问题, 测量数据保留到小数点后1位。
 | 图2 现场中四个位置摄像机中的目标车辆(a至d分别为摄像机1、摄像机2、摄像机3、摄像机4中的1号目标车辆; e至h分别为摄像机1、摄像机2、摄像机3、摄像机4中的5号目标车辆)Fig.2 Four cameras recording the vehicles in scene (a to d: No.1 vehicle, and e to h: No.5 vehicle, respectively recorded with camera 1, camera 2, camera 3, camera 4) |
| 表2 目标车辆车速测量结果 Table 2 Velocities measured from the targeted experimental vehicles |
1)摄像机1的帧速率是50帧/s, 近距离, 垂直角度, 车体上参考点与路上参考点也较容易“ 对齐” , 测量数据应该相对准确, 可作为比较的基准。摄像机3清晰度较好, 视野较大, 高空角度, “ 对齐” 效果不如摄像机1。
2)摄像机2是斜角度观察行驶车辆, 可以使用路边树木为路边两点间距离的参考物, 但会存在显著投影效应(路边两点间距离和目标车辆行驶距离不一致)。在车体前后缘上选取车体上两个参考点, 在虚拟线上选取路上参考点, “ 对齐” 效果比较差。只能模糊估算车体的前后缘, 以前后车轮中心为车体上两个参考点的话, “ 对齐” 效果稍好。
3)夜晚条件下, 车身轮廓、路面参考物边缘不清, 特别轮胎与路面接触更看不清。前后车灯边缘比较显眼(炫目情况除外), 考虑以前后车灯边缘距离为目标车辆移动距离为好。
4)设视频中目标车辆经过距离为l时, 经过帧数在n和n+1之间时, 车速应在v0=l/(n t0)和v=l/[(n+1) t0]之间进行估算, 也可作为误差估算的依据。
Δ v= v0-v=l/(n t0)- l/[(n+1) t0]≈ l/n, Δ v/v≈ 1/n。
可见车速一定时, 若行车距离小, n就小, Δ v/v大; 行车距离一定时, 若车速大, n就小, Δ v/v大。所以, 车速大, 行车距离小(如轮距和车长), Δ v/v大。
5)设视频中目标车辆经过时间t一定时, 经过距离可确定为l± Δ l, 那么Δ v/v=Δ l/l。
误差估算示例:我们选择试验车辆左前轮中心为起点, 左后轮中心前后整数帧的位置为终点, 作为移动距离。在23寸电脑屏上播放视频。摄像机1的帧速率是50帧/s, 近距离, 垂直角度, 车辆的左侧前后车轮比较清楚, 如图3a所示。屏上1 mm的距离变化清晰可见, 相当于目标车辆现场移动约2~3 cm(受屏幕大小影响)。参照轮辋半径的长度R17(22 cm), Δ l估算为轮辋半径的1/4(6 cm), l可实际测量。摄像机2帧速率是25帧/s, 斜角度观察, 左侧车轮较模糊, 如图3b所示。屏上1 mm的距离变化, 相当于目标车辆现场移动约8~10 cm。参照轮辋半径的长度R17(22 cm), Δ l估算为轮辋半径的长度(22 cm)。摄像机3帧速率是25帧/s, 距离远, 但比较清楚。屏上1 mm的距离变化, 相当于目标车辆现场移动约8 cm, Δ l估算为轮辋半径的长度R17(22 cm)的三分之二, 即15 cm。其他实验车辆类似, 误差估算结果见表3。
 | 图3 目标车辆行驶距离测量(a:摄像机1中的1号目标车辆; b:摄像机2中的1号目标车辆)Fig.3 Measuring the distance rolled with the target vehicles (No.1 vehicle in camera 1 (a) and camera 2 (b)) |
| 表3 试验车辆车速误差估算 Table 3 Errors evaluated from the real against the measured velocities of the targeted vehicles |
本实验采用四个位置的摄像机, 在交通事故车速鉴定案例中具有代表性, 摄像机1和摄像机2是两种极端情况。通过实验数据表明, 视频方法鉴定车速的结果相对准确, 一定条件下, 可以估算车速范围或误差。误差的估算要根据现场条件, 一般在5%~10%之间。斜角度观察目标车辆, 投影效应将影响对目标车辆的行驶距离确定。用来进行车速估算时, 要充分考虑“ 误差” 问题, 根据鉴定要求, 要指明速度界限。夜晚条件下在车灯边缘上选取作为参考点较好, 炫目情况除外。误差的大小主要取决于:车速和帧速率, 车体上参考点和路上参考点的对齐效果, 还有行车距离的大小, 摄像机的距离、角度和计算机屏幕大小等, 共同影响目标车辆移动距离的准确测量。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|