




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于三维激光扫描技术的犯罪现场重建
[刘晋1  , 禹鹏
, 禹鹏2 , 白隽瑄2 , 傅焕章1 , 潘俊君2, * ]
, 禹鹏]
|
|


第一作者简介:刘晋(1978—),男,山东沂水人,硕士,副研究员,研究方向为痕迹检验、现场勘验、现场重建。E-mail:markslab@163.com
当前,我国仍处在刑事犯罪高发的时期,犯罪分子的犯罪手段更加复杂、犯罪场景更加多样,而有效的犯罪现场重建将为侦查破案提供强有力的支撑。传统的犯罪现场重建工作繁重、低效,并且获取的现场数据是二维平面的,而将三维激光扫描技术应用于犯罪现场重建,利用其非接触性、实时、精确等优点,不仅可以保留犯罪现场的完整性,还可以快速精确地记录犯罪现场三维信息。本文对基于三维激光扫描技术的犯罪现场重建进行了综述,主要介绍了三维激光扫描设备的分类和具体的三维激光扫描技术流程,最后按犯罪现场的范围大小提出了不同的三维重建方案。
At present, social contradictions still leave high incidence of criminal offenses in China. In fight against the culprits exerting more complex criminal tricks and more diverse crime scenes, the effective crime scene reconstruction would provide powerful supports for criminal investigation. The traditional methods of crime scene reconstruction are onerous and inefficient, ridden plus the less informative 2D data collected from the scene. Not only does the 3D laser scanning technology preserve the integrity of the crime scene with its advantages of the non-contact, real-time and the accurate reconstructing of the scene, but record quickly and precisely the much more 3D information of the scene as well. In this paper, a survey was made on crime scene reconstruction based on 3D laser scanning technology, mainly introducing the classification of 3D laser scanners and the concrete processes of 3D laser scanning. At last, different 3D reconstruction schemes were come up with according to the field dimension of crime scene.
犯罪现场重建(Crime Scene Reconstruction)是指基于对犯罪现场的痕迹、物证的位置和状态及其相互关系的考察分析, 以及对物证的实验室检验结论的利用, 结合所获取的相关客观事实, 合乎逻辑地以抽象、形象或实物模拟的方式, 重新构建犯罪现场所发生的犯罪内容和犯罪过程, 并探明与之相关的犯罪行为人的个人特点和犯罪条件的侦查活动[1]。所以, 犯罪现场的重建不仅需要保留犯罪现场的物证信息, 还要对犯罪过程进行重建。犯罪现场重建是现代刑事侦查中一个重要的手段, 它主要有两种重要的功能:揭示功能和演示功能[1]。犯罪现场重建能够揭示犯罪内容和犯罪过程, 它具有科学的支撑, 所以结论更加可信。在法庭上控方也可以通过犯罪现场的演示直观地展示证据, 以此来得出令人信服的结论。
传统的犯罪现场重建方法一般通过现场笔录、现场照片、现场物证分布图等还原犯罪现场[2]。但是此类方法程序复杂、时间长, 而且很容易遗漏对重要证据信息的采集; 除此之外, 传统的方法并不能完整地保存犯罪现场的三维信息, 而且更多依赖于办案人员的主观认识, 不能有效发挥客观存在证据在案件侦破中的重要作用。如今, 犯罪手段更加复杂, 犯罪场景更加多样。因此使用科学高效的方法进行犯罪现场信息的记录和保存在取证调查中变得越来越重要。近年来, 虚拟现实技术方兴未艾, 将虚拟现实技术应用到犯罪现场三维重建也成为国内外刑侦领域的趋势。其中, 非接触式的三维激光扫描系统将在未来的犯罪现场重建中发挥重要作用。
在国外的一些案件侦破中, 已经开始使用三维激光扫描技术。Thali等人[3, 4, 5]在论文中描述了如何使用三维测量技术获取案件中新的数据, 以及如何利用虚拟三维重建来帮助办案人员确定一个事件是事故还是犯罪案件。Subke等人[6]在计算机的辅助下对枪击案进行三维重建。Puentes等人[7]利用三维重建技术对子弹的运行轨迹进行建模, 以此确定受害者枪伤的形成原因。Buck等人[8]在论文中展示了两个真实的案例, 在案件的侦破过程中利用三维激光扫描重建了犯罪现场并在真实数据的基础上对犯罪过程进行了动画演示, 最终确定了案件的性质。Cavagnini等人[9]在文章中描述了如何使用相机对犯罪现场进行记录并根据照片实现自动三维重建, 之后将三维重建的系统应用于法医学当中, 文章显示出三维数据在案件侦破中重要的辅助作用。Agosto等人[10]利用完全几何方法对犯罪现场进行了重建和分析, 几何方法的数据来源有全站测量仪、摄影和激光扫描仪。
在国内, 朱福全等人[11]介绍了基于Virtools技术的犯罪现场三维重建, 并在文中对现场三维重建的过程进行了详细的分析, 最后利用一个真实的入室杀人案的犯罪现场和犯罪过程的重建展示了三维重建在案件侦破中的重要作用。但是这篇文章提出的三维重建方案需要使用Photoshop等软件对后期的三维模型进行纹理贴图等操作, 除此之外, 要实现犯罪嫌疑人的行为重建和漫游设计需要编写脚本, 这样就加重了办案人员的工作, 而且这也使得整个三维重建工作周期更长。张峰等人[12]提出了一种基于图像的室内大场景自动三维重建系统, 该系统能够通过采集多幅图像来实现对室内场景的三维重建, 但最终得到的三维系统效果还有待提高。
三维激光扫描是一种利用激光捕捉物体形状的非接触、非破坏性技术。三维激光扫描技术的这种特点有利于在获取犯罪现场三维空间数据时保护现场的完整性。三维激光扫描技术通过扫描物体的表面获取点云数据, 即由具有三维空间坐标的点组成的数据, 可以用来表示物体的形状和大小。三维激光扫描设备可以对任意形状的物体进行扫描, 而且具有速度快、精度高、全自动、数字化等特点。对于需要精确描述的复杂场景和精确表示的物体轮廓, 比如对桥梁、建筑物、工厂等对象, 三维激光扫描技术相对于传统的三维重建方法具有更大的优势。现有的三维扫描设备, 不仅可以快速精确地对犯罪现场进行扫描重建, 还可以在生成的三维场景中进行漫游, 比如:在完成犯罪现场的三维重建之后, 可以在得到的三维系统中设定犯罪嫌疑人的行走路径, 然后以第一视角或第三视角观察犯罪嫌疑人在该系统中的运动过程, 这恰好可以实现现场重建揭示和演示的功能。在本文中, 首先根据扫描场景的范围和类型对三维激光扫描设备进行分类, 然后对三维激光扫描技术和进行犯罪现场重建的流程进行介绍。
犯罪现场的场景种类复杂, 场景的范围大小各异。所以, 要有针对性地使用不同类型的三维扫描设备进行协同处理。从扫描范围看, 三维激光扫描仪一般分为三种类型:机载激光扫描仪(Airborne Laser Scanner)、地面激光扫描仪(Terrestrial Laser Scanner)、手持激光扫描仪(Hand-held Laser Scanner)。
机载激光扫描仪:装载在飞机上的激光发射器重复高速率(每秒几千次)地向目标物体发射激光束, 之后通过接收器监测被物体表面反射回来的激光脉冲, 然后计算机记录激光发射器发射出和接收到的激光脉冲之间的差异和返回激光束能量强度, 由这些数据就可以计算出飞机与目标物体之间的距离。测量过程如图1所示, 所有扫描的点都要在一个绝对坐标系中, 但飞机一直在运动, 所以还需要提供地面惯性系统(INS)、飞机的方向、飞机的位置(GPS获取)、激光束发射时的方向、发射时发射器的位置来计算每个扫描点在绝对坐标系中的坐标。在获取扫描的点云数据后, 处理软件自动对扫描场景进行三维重建。机载激光扫描仪的扫描范围大、扫描快速、扫描精度可达10 cm。三维扫描过程不易受光照和航高等参数影响, 扫描数据的处理由特定软件完成, 大大缩短了测量时间, 极大提高了航测的效率。对于范围大、环境复杂的犯罪场景, 如高铁事故现场、爆炸案现场, 可以使用机载激光扫描仪进行快速扫描和三维重建。
 | 图1 机载激光三维扫描Fig.1 Airborne laser scanner |
地面激光扫描仪:地面三维激光扫描仪的原理与机载三维激光扫描仪的原理相同, 不过需要固定在地面上工作, 如图2所示。将扫描仪放置在地面上使得它能够从多个角度获取待扫描物体的信息。地面三维激光扫描仪能每秒钟获取待扫描物体表面几万到几十万个样本点, 这比传统的测绘和摄影采集技术的数据采集密度更高。地面三维激光扫描仪更适合获取小型不规则的物体, 如建筑物、土木工程和开采过程中需要监测的悬崖面的地形。地面三维激光扫描技术是一种数字重建大型物体和全景的新颖且有效的方法, 可将地面三维扫描仪看作是一个电动的全站扫描仪, 它能够自动地对周围物体进行水平和垂直方向扫描。对于每个扫描点, 它到扫描仪的距离和水平垂直夹角都会被记录下来, 所以它在扫描仪相关的空间坐标可以计算出来。此外, 激光扫描仪还会记录每一点的光照强度值, 这个强度值由转换和放大的反向散射光功率得出的电信号强度值计算得出。每个点的光强在其他应用中也有作用, 比如点云对齐、点云分类等。地面三维激光扫描仪, 使用的场景范围一般都在百米左右, 可以对一些复杂的场景进行扫描, 并且可以精确地计算场景中点与点之间的距离, 它还能够对各种不规则物体进行扫描和重建。但是地面三维激光扫描仪也有很多缺点, 比如点云遮盖等问题。地面三维激光扫描技术应用相当广泛, 在地质灾害监测、土方和体积测量、文物保护和古建筑物修复、事故调查测量、生物医学测量、工业设备测量、地质测绘[13]等多个领域都有重要的作用。
 | 图2 地面三维激光扫描设备(Leica ScanStation PS16[14])Fig.2 Terrestrial laser scanner (Leica ScanStation PS16[14]) |
手持激光扫描仪:手持三维激光扫描仪发射激光投影到目标物体上并用一个传感器测量扫描仪到物体的距离, 最后通过三角化方法生成目标物体的三维模型, 如图3所示。获取的数据与扫描仪内部的坐标系有关, 所以扫描仪在运动中搜集数据时也需要确定扫描仪自身的位置。扫描仪的位置可以通过在目标物体上设置标志物(通常是胶粘剂反光片)来确定, 或者使用外部追踪方法, 即利用集成的3个或更多相机组成的六自由度摄影进行追踪。扫描仪获取到三维空间的点云数据后, 将数据转换成三角网格和CAD模型, 通常是非均匀有理B样条曲面。手持三维激光扫描仪一般用来扫描单个物体, 或者小范围内的场景。手持扫描仪可以在扫描物体时移动, 所以很适合在犯罪现场对某个物证进行扫描和三维重建。
 | 图3 手持三维激光扫描仪(FARO Freestyle3D X[15])Fig.3 Hand-held laser scanner (FARO Freestyle3D X[15]) |
三维激光扫描技术的处理过程[16]分为三个步骤:点云数据的获取、点云数据的预处理和三维模型重建(可视化)。除此之外, 扫描仪还有一台内置相机对目标场景拍照, 用于后期对三维模型进行纹理贴图映射。
2.2.1 点云数据获取
三维激光扫描技术是一种非接触主动式扫描技术, 扫描仪发射一种辐射或光并检测它的反射来获取物体或环境信息。通常发射类型有光、超声波和X射线等。典型的三维激光扫描仪检测技术一般分为2大类:飞行时间法和相位偏移法。这两种技术之间是相互独立使用的, 不过也可以将他们结合起来使用。Alonso等人[17]在文章中对两种方法进行了比较。下面本文将对这两种技术进行简要介绍。
飞行时间法:飞行时间法利用光速c(3.0× 108 m/s)来测量扫描仪到某一点的距离。首先, 扫描仪发射一束激光, 激光到达某个物体的某一点, 经过反射的一部分激光返回扫描仪被传感器捕捉到。从发射激光到激光从物体某一点返回的时间为t, 那么扫描仪到该点的距离为D=ct/2。三维激光扫描仪的精度取决于时间t的测量精度, t越精确得到的点的位置越精确。每一时刻, 激光扫描仪在一个方向只能扫描一个点的位置。所以, 如果要扫描一个场景则需要不断变换方向来扫描不同的位置, 扫描的点融合在一起形成了点云数据。飞行时间法的优点是测量范围广、利于大场景的扫描重建。缺点是扫描精度较相位偏移法低。
相位偏移法:三维激光扫描仪发射连续的周期性信号到待测物体, 将遇到物体某一点反射回来的信号与原发射信号进行对比, 得出信号的总相位偏移φ 。假设调制信号频率为f, 将φ 分为波长整数倍Nλ 和不足一个整波长的部分Δ φ , 则三维激光扫描仪到物体该点的距离D为:
式中整数通过使用多频率激光测量同一点得出距离集合的交集确定。相位偏移法测距的优点是测量的精确度极高, 缺点是测量范围较小, 一般适合小范围场景的扫描重建。
2.2.2 点云数据预处理
点云数据的预处理一般包括3个步骤:异常点去除、点云配准和点云平滑(局部去噪)。异常点去除[18]过程将不在物体表面或距离物体表面超过一定阈值的点去除掉, 如图4所示。
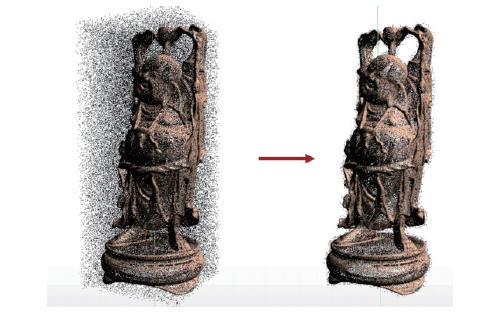 | 图4 异常点去除前后[18]Fig.4 Pre-(Left) and post-(Right)removal of the outliers |
点云配准[19]在现场重建过程中具有重要作用。对现场进行的扫描过程经常会出现遮挡的情况, 为了获取更精确的模型, 往往需要将扫描仪放在不同的位置对同一场景进行多次扫描, 这就会导致扫描得到的点云数据三维坐标位于不同的坐标系中, 扫描到的场景也会有差别, 同时扫描的场景会有重叠。点云配准的功能就是将这些在不同坐标系中的点云数据变换到同一坐标系中, 并且将重叠的部分对齐。图5(a)为从两个不同的角度对大卫头像扫描得到的点云数据, 并且标定了一些特征点作为对齐参考点, 经过点云配准之后的点云数据如图5(b)所示。
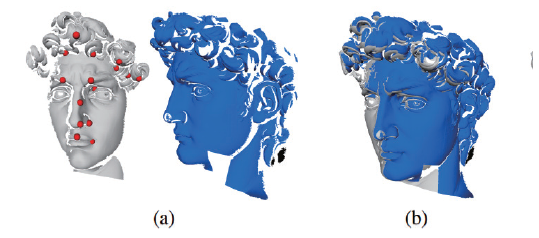 | 图5 点云配准[19]Fig.5 Pre-(a) and post-(b)registration of the point cloud data |
点云光滑:在获取点云数据之后一般会进行三角化, 即将场景中的物体用三角网格表示。由于噪音的存在, 三角网格往往是不光滑的, 为了对三角网格进行光滑处理, 一般会采用拉普拉斯法、双边滤波法和平均曲率流法等。不精确的扫描数据和数据合并过程容易也会产生噪声, 噪声的存在会大大影响物体三维重建的操作, 比如:网格化、表面细化、表面参数化和光滑处理等过程。Guskov等人[20]使用局部波前遍历法来消除局部噪声。
2.2.3 三维场景重建(可视化)
犯罪现场三维场景重建的目的就是建立一个尽可能接近犯罪发生时实际状态的场景。在完成数据的采集和预处理之后, 还需要对场景中的物体(作案工具、家具、血迹等)进行建模, 然后将各个物体组合在一起形成一个完整的三维场景。对物体建模广泛采用的方法是构建几何模型, 比如三维表面或三维体积。由许多三角形组成的三角形网格是表示复杂表面的一种常用方法, 这是一种创建非冗余没有重叠表面的理想方法。生成三角网格之后需要将纹理图片映射到三角形网格上来达到照片级的真实感。纹理图片一般由一个单独的相机获取, 且一个模型可能需要多个纹理图像。纹理图像间可能存在接缝, 需要进行平滑处理, 一般采用线性插值法。在完成三维场景重建后, 可以进行全景虚拟漫游。办案人员可以通过特定的软件(比如Cyclone软件[21])进行测量得出物证的尺寸, 痕迹的长度等信息, 且可以将经分析得出的犯罪嫌疑人作案过程加载到三维场景中, 通过动画的方式演示整个犯罪过程, 以便验证该犯罪过程的可能性和可靠性。同时, 也可以通过鼠标、键盘等进行场景进行平移、旋转、放缩等操作。虚拟漫游的功能使得办案人员可以根据对案件的分析以第一视角或第三视角真实地再现整个犯罪过程。
三维激光扫描技术应用于犯罪现场重建之前已经广泛应用于其他领域, 比如地质测量、古遗址古建筑重建[22, 23, 24, 25]、环境调查等场景。虽然三维扫描技术应用场景各异, 但他们都有一些共同点:扫描要求非接触、速度快、精度高、自动化、数字化。这也正是犯罪现场三维重建需要满足的要求。
本章针对不同范围的犯罪现场(大型场景、中型场景和小型场景), 提出不同的重建方案, 具体如下:
大型场景, 如天津港危险品仓库爆炸现场、温州动车追尾事件现场等。这些场景大多在室外, 涉及范围广、环境复杂。针对大型场景, 可以利用机载三维激光扫描仪对现场进行全方位实时扫描获取现场的三维数据, 然后利用地面三维激光扫描仪对重要场景进行地面扫描, 最后使用手持激光扫描仪对重要的证物、线索进行扫描。这样就可以全方位、多角度、快速精确地获取现场信息。在信息采集完成后, 办案人员可以快速地利用相关软件对现场及物证线索进行三维重建。生成的三维现场可用于犯罪过程或事故过程的推演和模拟再现。Barazzetti等人[26]展示了一个利用激光扫描仪对室外大场景犯罪现场重建的案例。在该案例中, 警方使用4台ToF instrument Riegl LMS-Z420i激光扫描仪, 其中3台在地面的不同位置, 一个在空中获取鸟瞰图。扫描过程花费2个小时, 获取了大约8百万个点云数据。同时, 利用Nikon D700拍摄了92张图片作为纹理为点云自动上色。如图6左侧是激光扫描设备, 中间是鸟瞰图, 右侧是由点云重建出的犯罪现场三维场景。
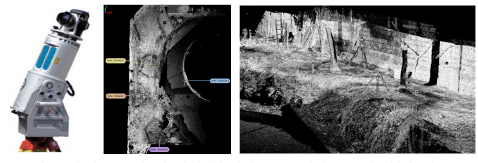 | 图 6 大范围犯罪现场重建实例[26]Fig.6 An example of large scale crime scene reconstruction |
中型场景, 如高速公路车祸现场等。办案人员可以先利用地面三维激光扫描仪对现场进行全方位扫描获取现场的三维数据, 然后对重要物证利用手持激光扫描仪进行详细扫描。在获取这些数据后, 办案人员可以对现场进行三维重建, 将手持三维激光扫描仪所得到的数据与地面激光扫描仪所得到的数据融合在一起, 然后进行测量、过程模拟等。
小型场景, 如入室抢劫杀人案等。此类案件场景一般都在一个面积较小的密闭空间内, 近距离精确测量可以在记录、测量和解释现场照片的时候提供充足的物体信息。类似于中型场景, 办案人员先利用地面三维激光扫描仪对案发现场进行360 ° 全方位扫描, 记录整个现场的三维信息, 然后利用手持三维激光扫描仪对重要物证进行扫描。办案人员可以在不破坏现场的情况下对整个现场进行三维重建。在获取整个场景后, 办案人员可以在重建之后的三维空间中模拟案件的发生过程, 并对提出的假设进行验证, 如对子弹路径和血迹的模拟等。整个过程不仅可以提高办案人员的效率, 还可以在法庭质证过程中演示, 以增加证据的可信度。Agosto等人[10]在室内谋杀案中利用手持激光扫描仪(Creaform Handyscan3D)对犯罪现场的脚底模型进行建模, 并对犯罪嫌疑人的行走路径进行了演示。Creaform Handyscan 3D 可以以25 000点/ s的速度进行扫描, 扫描分辨率为0.05 mm, 扫描精度为0.04 mm。将该扫描仪的扫描数据读入特定的软件并经过软件的自动处理就可以得出脚印的3D模型。之后脚印的3D模型可以映射到整个犯罪现场中并模拟出犯罪嫌疑人的行走路径。
将三维激光扫描技术应用于犯罪现场的重建相较于传统方法有很大优势。利用三维激光扫描技术不仅能够完整地保存案发现场的三维信息, 还能揭示和重演犯罪嫌疑人的犯罪过程, 这将会提高办案人员现场勘验和现场分析的效率和质量, 有助于明确侦查范围和方向, 从而尽可能快地破获案件。此外, 三维扫描仪获取的电子数据可以永久备份保留。虽然, 将三维扫描技术应用于犯罪现场重建仍要解决很多技术难题, 如生成的三维网格会出现空洞、地面激光扫描仪在扫描过程中会遮挡的问题等, 但可以预见的是, 随着技术水平的提高, 三维激光扫描技术必将在未来的刑事侦查中发挥越来越重要的作用。
The authors have declared that no competing interests exist.
作者已声明无竞争性利益关系。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|