

{kind=link}
{kind=link}
{kind=link}
{kind=link}
监控视频中车辆平均速度测算方法比较
[邬治锋 ]
]
]
|
|


作者简介:邬治锋(1978—),男,宁夏银川人,讲师,主要从事声像资料司法鉴定教学与研究。Tel:18709292971;E-mail:wzf_789@sina.com
根据车辆速度计算公式,提出了两种基于监控视频测速的思路。一是视频图像与实地测量相结合,车辆运动距离通过与监控画面匹配后实地测量,运动时间通过视频帧率运算分别获得。二是利用车辆技术参数测量,在视频图像中,车身前后明显部位经过同一点,车辆运动距离和时间分别通过被测车型技术参数、视频帧率运算获得。并通过实验结果对两种方法进行评价。
According to calculation formula of vehicle speed, two methods for measuring the vehicle's speed based on the surveillance video were suggested. The first method is based on the combination of video image and field measurement. Matched with the surveillance video image, the vehicles' movement distance can be measured on field, and the movement time can be calculated from the video frame rate. The second method uses the measurement of vehicles technical parameters. While the vehicles' typical part passes the same point in the video image, the movement distance and time can be obtained from the vehicles' technical parameters and video frame rate. Two methods have been evaluated by experiments.
在很多刑事和交通肇事案件中经常需要测定车速。目前, 利用监控视频测速可分为两大类:一类是主动测速, 主要是通过安装专业测速设备来测定车辆行驶速度; 一类是被动测速, 即事后调取监控视频, 通过监控视频记录的车辆行驶状态测定车速。在大量需要测速的案件中, 往往是被动测量。近些年, 国内对视频测速的研究很多是通过单映射函数的换算等方法实现, 尽管精确度较高, 但受现场环境条件、监控设备和视频图像质量影响较大, 很多案件因缺乏必要的鉴定条件无法测定车速。本文主要介绍利用监控视频与实地测量相结合、与车辆技术参数相结合两种测速方法, 并进行实验验证和分析比较。
所有车辆测速均基于以下公式, v=Δ d/Δ t=(s1-s0)/(t1-t0)。测速中, 只要确定在某一时间段内(t1-t0), 车辆移动的实际距离(s1-s0), 就可以获得车辆在该距离内的平均行驶速度。利用监控视频测速, 通过视频信号的固定帧间时间可直接得到Δ t[1], 只要测量视频图像中车辆在Δ t内移动的像素距离, 并找到像素距离与实际距离的对应关系, 即可获得Δ d。
2.1.1 具体步骤 (1)回放。在连接硬盘录像机的显示屏上回放有被测车辆的监控视频。
(2)配准。考虑案发后, 无论是球机还是枪机, 镜头、云台等拍摄装置或多或少都会有变焦、位移等变动, 在监控室所看到的实时画面, 与回放有被测车辆的画面很少完全一致。因此, 可在上一步回放的视频中, 利用硬盘录像机播放“ 暂停” 功能, 在静止画面中选取3个以上有明显特征的固定点, 且不在同一直线上, 直接在监控屏幕上标识。然后, 切换到实时监控画面, 对镜头、云台进行微调, 使其中的固定点与屏幕上的标识点基本重合。
(3)描点。在回放的监控视频中, 利用播放“ 暂停” 功能分别选取被测车辆与地面接触位置较清晰的两点s0、s1, 在监控屏幕上标识, 如示意图1、图2。
 | 图1 被测车辆与地面接触位置s0 |
 | 图2 被测车辆与地面接触位置s1 |
(4)测量。测量人员进入实时监控画面, 与监控室的观察人员相互配合, 在现场直接确定描点标识所对应s0、s1的实际位置, 并测量两点之间的距离。在确定标识点位置后, 测量人员须在监控画面中保持固定姿势1s以上, 并准确记录此时监控录像显示时间。
(5)定位。分别调取有被测车辆和实地测量时的两段监控视频, 在计算机上播放, 利用播放器单帧进退功能, 通过上一步记录的时间找到测量人员在标识s0、s1时的位置, 并与截取有被测车辆的各帧图像比对, 确定车辆在s0、 s1位置时监控视频的帧数, 设为z0、z1, 查看该段视频录像的帧率f, 按下式Δ t=( z1-z0)/f, 即得出车辆从s0至 s1的行驶时间。
(6)计算。依据v=(s1-s0)/Δ t, 即可得到车辆在s0至 s1之间的平均速度。
2.1.2 实验验证 (1)实验准备。选用“ 海康威视” DS-7016H-S硬盘录像机, 输出视频格式为mp4, 帧率f为25帧/秒, 使用硬盘录像机自带的播放器回放。实验车辆为海马海福星1.6L手动标准型三厢小轿车, 以时速40km/h均速驶过监控道路。
(2)实验过程及结果。经监控室与实地测量人员相互配合, 确定s0、s1的实际位置, 测量得s1-s0=9.6m。在监控录像中, s0对应z0为第397帧, s1对应z1为第419帧, z1-z0=22帧。因此, Δ t=(z1-z0)/f=22/25=0.88s。v=(s1-s0)/Δ t=9.6/0.88=10.9m/s=39.2km/h。
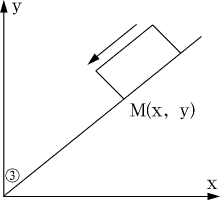
2.2.1 具体步骤 (1)在调取有嫌疑车辆的视频中, 选取车辆直线行驶中较清晰的一帧z0; 用photoshop等图像处理软件打开该帧图像, 在车辆前部明显部位(如车辆最前端、前轮轴中心点等)选取一点M, 记录该点像素坐标M(x, y), 如图3。
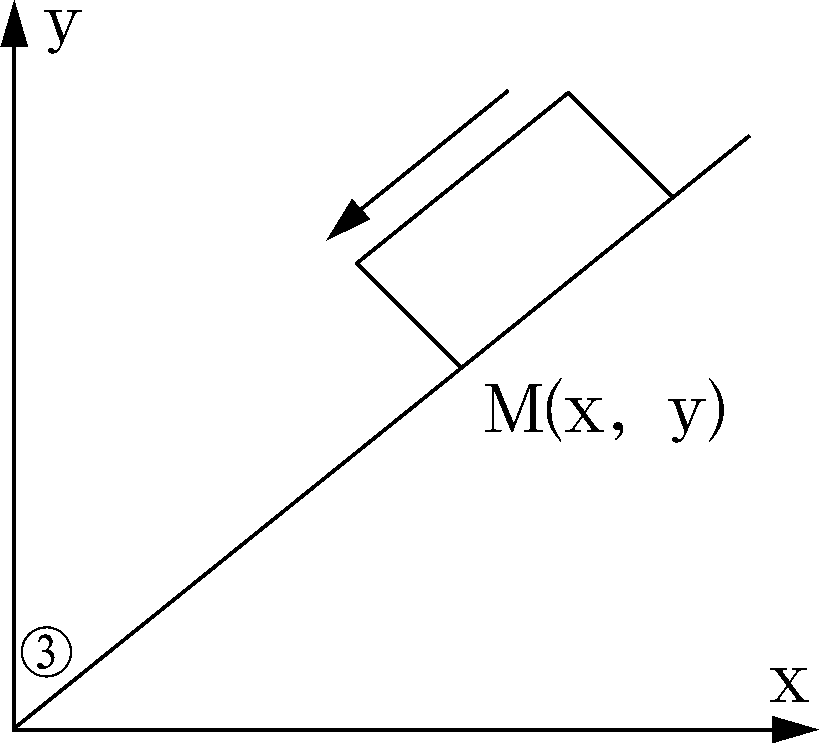 | 图3 在车辆前部明显部位选取M点 |
(2)若车后部明显部位(如车辆最末端、后轮轴中心点等)经过M点时, 恰好可以截为一帧图像, 则记录帧号z1, 即可计算车身前后两点经过M点的时间差Δ t=( z1-z0)/f, f为该段视频的帧率。
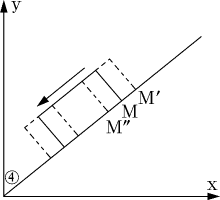
(3)若按f帧率截图, 车后部明显部位经过M点时, 不能截为一帧图像, 而是前一帧z1', 像素坐标为M'(x', y'), 还未到M点, 后一帧z1″, 像素坐标为M″(x″, y″), 已经超过M点(实际情况经常如此)。则单位帧率内车辆移动的实际像素距离
车身经过M点所用时间Δ t=( z'1-z0)/f+Δ t', 如图4。
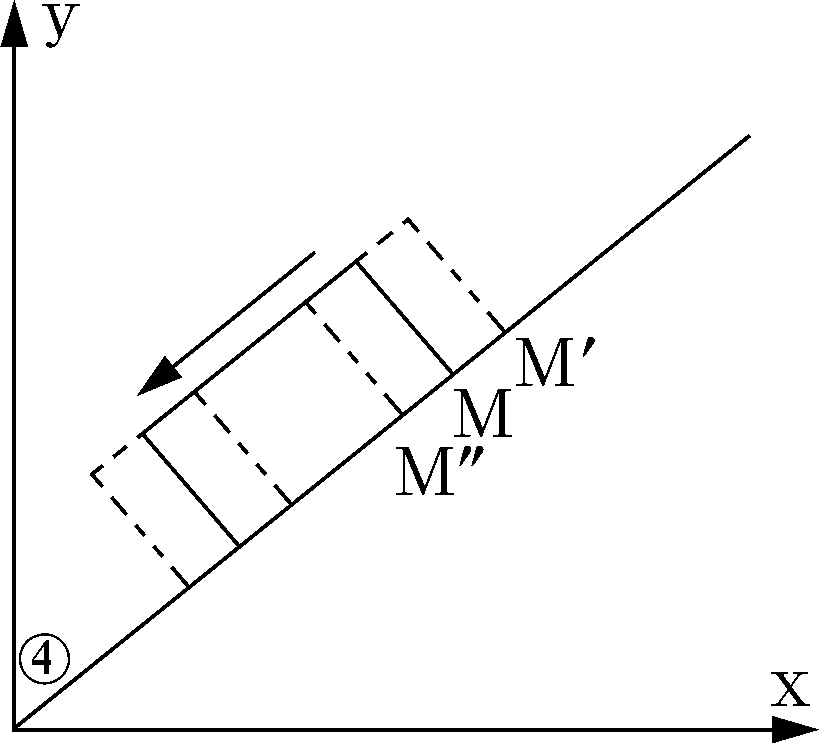 | 图4 车身经过M点所用时间 |
(4)根据视频反映的车辆型号, 查找或测量选取前后两点的距离L, 可得到Δ d, 依据v=Δ d/Δ t, 即得到车辆经过M点的平均速度。
2.2.2 实验验证 (1)与“ 方法一” 使用同一视频文件, 截取第z0帧图像(帧号为407), 在车辆右前轮轮轴中心选取M点, 像素坐标为(3.17, 3.46)。
(2)截取右后轮轮轴中心经过M点的前一帧z1(帧号为413), 选取右后轮轮轴中心M'点, 像素坐标为(3.16, 3.45)。
(3)在z1+1帧(即414帧)图像上, 选取右后轮轮轴中心M″点, 像素坐标为(3.35, 3.45)。
(4)根据M'M″=
利用视频图像实地测量法, 是建立在现场重建基础上的一种模拟测速方法。此方法的优点体现在:一是由于监控镜头、云台的轻微变焦、位移会同时作用于两点, 对测量两点之间的距离影响很小。因此, 不需要对前后两段画面进行精确配准。这为直接在硬盘录像机的显示屏上描点, 提供了实现可能。二是使用的视频图像数据均为固定点位, 不受成像近大远小的影响, 可达到较高的精确度。三是在调取有被测车辆和实地测量时的两段监控视频中, 由于车辆处于运动状态, 而测量人员在s0、 s1位置处于静止状态, 通过与配准点等固定参照物比对, 可以很容易获得车辆在这两点的帧号。但也必须注意到, 配准和描点都是在电子屏幕上进行, 显示屏的质量、观察和标定人员的视角影响其精度, 应尽可能保持在同一角度和位置进行观察、标定; 屏幕描点的大小与图像中的对应位置会有差异, 可选用较细的签字笔或水彩笔描点; 在监控视频中选取的车辆s0、 s1位置, 与车辆实际行驶位置有偏差, 且图像分辨率越低, 偏差越大, 可采取多次选点、在车身不同位置选点求平均值的方法, 缩小误差。
利用车辆技术参数测量法, 是基于确立图像中像素距离与实际距离对应关系的一种测速方法。此方法的优点主要体现在:一是由于车身选点可在车辆任何部位, 只要被测车辆车身全部进入监控视频范围, 原则上都可测量, 不受监控镜头方向、车辆行驶方向等因素的影响, 应用范围较广。二是使用的视频图像数据为固定点位, 同样不受成像近大远小的影响, 可达到较高的精确度。但由于受视频图像分辨率高低、人为操作差异的影响, 利用Photoshop等图像处理软件定位车身某点的像素坐标会有误差, 且车速越大误差越大。可考虑在车身同一部位多次选点、在不同部位分别选点求平均值的方法以缩小误差。
当前, 我国公共监控视频整体质量不高、专业测速设备尚未完全普及, 需要依据现实情况研究探索车辆测速的各种方法。以上两种测速法, 由于人为操作环节较多, 与现代先进的影像测量技术、专业测速设备相比, 仍属于“ 概略测算” 。另外, 实验选取环境有一定局限性, 实践中还需要考虑被测车辆刹车、行驶道路不平等情况。因此, 此种方法在一些复杂现场中的可行性、实用性还有待进一步验证。
The authors have declared that no competing interests exist.